Roboter – Klassifizierung, Einsatzgebiete und Beispiele
Arten von Robotern, definitonen und Klassifikationen. Roboter haben längst in viele Bereiche unseres Lebens Einzug gehalten. Von Fabrikhallen über Krankenhäuser bis hin zu Ozeantiefen und dem Weltraum werden spezialisierte Maschinen eingesetzt, um Aufgaben effizienter, präziser oder sicherer zu erledigen. Dabei gibt es eine große Vielfalt unterschiedlicher Roboterarten, die sich systematisch nach Einsatzgebiet, Mobilität oder Bauweise klassifizieren lassen. So unterscheidet man beispielsweise Industrieroboter, Serviceroboter, medizinische Roboter, Militär- und Sicherheitsroboter, mobile Roboter, humanoide Roboter, Schwarmroboter, Unterwasserroboter, Raumfahrtroboter und Agrarroboter. Diese Kategorien überschneiden sich zum Teil – zum Beispiel kann ein mobiler Roboter auch ein Serviceroboter sein – doch sie bieten einen guten Überblick über die wichtigsten Typen. Im Folgenden werden die genannten Roboterarten im Detail vorgestellt, mit ihren Merkmalen, typischen Einsatzgebieten, besonderen technischen Eigenschaften und jeweils einem Beispiel für ein konkretes Robotersystem.
Inhalt
- Kilobot
 Schwarmroboter im Taschenformat – Die Kraft der Vielen Kilobot, die enfesslung der vielen. Ein leises… Kilobot weiterlesen
Schwarmroboter im Taschenformat – Die Kraft der Vielen Kilobot, die enfesslung der vielen. Ein leises… Kilobot weiterlesen - Serviceroboter
 Serviceroboter – Helfer im Alltag und der Industrie Serviceroboter sind Roboter, die dafür entwickelt wurden,… Serviceroboter weiterlesen
Serviceroboter – Helfer im Alltag und der Industrie Serviceroboter sind Roboter, die dafür entwickelt wurden,… Serviceroboter weiterlesen
Industrieroboter
Industrieroboter sind die Pioniere der Robotik und bis heute aus modernen Fabriken nicht wegzudenken. Dabei handelt es sich meist um stationäre, fest installierte Roboterarme mit mehreren Achsen (typischerweise 6), die vom Computer präzise gesteuert werden. Ein Industrieroboter besteht aus einem mechanischen Manipulator (dem Gelenkarm mit Motoren an den Gelenken), einer Steuerungseinheit und einem Endeffektor wie etwa einem Greifer, Schweißgerät oder Saugnapf, der die eigentliche Aufgabe ausführt. Die Funktionsweise basiert auf vorher programmierten Bewegungsabläufen: Der Roboter führt hochgenau wiederholbare Bewegungen aus, um Montage-, Bearbeitungs- oder Handhabungsprozesse durchzuführen. Moderne Industrieroboter sind mit Sensoren ausgestattet und können durch Kameras oder Laserscanner ihre Umgebung wahrnehmen, was zum Beispiel für Sicherheitsfunktionen oder visuelle Qualitätskontrollen genutzt wird. In den letzten Jahren gewinnen auch kollaborative Industrieroboter (sogenannte Cobots) an Bedeutung – das sind Roboterarme mit speziellen Sensoren und Sicherheitsmechanismen, die direkt mit menschlichen Arbeitern zusammenarbeiten, ohne Trennzäune.
Einsatzgebiete: Haupteinsatzfeld der Industrieroboter ist die Fertigung und Produktion. In der Automobilindustrie übernehmen Roboter seit den 1970er-Jahren Schweißarbeiten an Karosserien, das Lackieren von Fahrzeugteilen oder das Einsetzen von Scheiben. In der Elektronikfertigung bestücken Roboter Platinen mit Bauteilen oder montieren Smartphones. Weitere typische Aufgaben sind Schweißen, Lackieren, Palettieren, Verpacken, Bestücken von Maschinen und Qualitätsprüfung. Industrieroboter arbeiten meist rund um die Uhr mit hoher Geschwindigkeit und Präzision. Ein großer Vorteil ist ihre Wiederholgenauigkeit – sie können millionenfach denselben Handgriff ausführen mit Abweichungen im Zehntel-Millimeter-Bereich. Auch schwere Lasten lassen sich mit speziellen Robotern bewältigen, was manuell nur schwer möglich wäre. Mit Hilfe von Industrierobotern lassen sich Produktionsprozesse effizienter gestalten, die Produktqualität steigern und Mitarbeiter von gefährlichen oder monotonen Arbeiten entlasten.
Besondere Merkmale: Industrieroboter sind typischerweise stationär befestigt und besitzen ein starres Gestell, um die nötige Stabilität für schnelle Bewegungen zu gewährleisten. Sie verfügen über leistungsfähige elektrische oder hydraulische Antriebe an den Achsen und meist über eine eigene Steuerung mit speziell entwickelten Programmiersprachen. Die Programmierung erfolgt häufig offline am Computer oder durch Teach-In (der Programmierer bewegt den Roboterarm manuell durch die gewünschte Bewegung, die Steuerung “lernt” die Punkte). Sicherheitsvorkehrungen wie Schutzzäune, Lichtschranken oder Sensoren sorgen dafür, dass Menschen im Umfeld geschützt werden – außer bei Cobots, die so konzipiert sind, dass sie bei einer Kollision sofort stoppen oder nur geringe Kräfte aufwenden.
Beispiel: Ein bekanntes Beispiel für einen Industrieroboter ist der KUKA KR 1000 „Titan“. Dieser gewaltige, sechsachsige Roboterarm des deutschen Herstellers KUKA kann bis zu 1000 kg Gewicht bewegen. Er wird unter anderem in der Schwerindustrie eingesetzt, etwa um schwere Bauteile wie Stahlträger oder Motorblöcke präzise zu handhaben. In der Automobilproduktion sieht man hingegen oft kleinere Modelle desselben Herstellers oder von Konkurrenten wie ABB und Fanuc: Zum Beispiel schweißen orangefarbene KUKA-Roboterarme in den Fertigungslinien großer Autohersteller Karosserieteile zusammen – eine Aufgabe, die sie mit unerreichbarer Geschwindigkeit und Genauigkeit erledigen.


Serviceroboter
Serviceroboter sind Roboter, die außerhalb der Industrieproduktion Dienstleistungen für Menschen oder Einrichtungen erbringen. Diese Kategorie ist sehr breit gefächert, da sie sowohl professionelle Serviceroboter (etwa für Krankenhäuser, Hotels oder öffentliche Einrichtungen) als auch persönliche Serviceroboter (für den privaten Gebrauch im Haushalt) umfasst. Serviceroboter agieren meist in unmittelbarer Umgebung von Menschen und in relativ offenen, sich verändernden Umgebungen. Ihre Funktionsweise ist darauf ausgelegt, teilweise autonom Aufgaben zu übernehmen, die dem Menschen helfen oder ihn entlasten. Oft sind sie mit verschiedenen Sensoren (Kameras, Ultraschallsensoren, Drucksensoren etc.) ausgestattet, um ihre Umwelt wahrzunehmen, Hindernissen auszuweichen und sicher mit Menschen zu interagieren. Anders als Industrieroboter müssen Serviceroboter häufig flexibel auf ungeplante Situationen reagieren können – zum Beispiel auf Personen, die ihnen im Weg stehen, oder auf unterschiedlich geformte Objekte, die es zu greifen gilt.
Einsatzgebiete: Die Palette der Einsatzgebiete ist groß. Im Haushalt finden sich Serviceroboter in Form von Staubsaugerrobotern oder Rasenmährobotern, die selbstständig reinigen bzw. den Rasen trimmen. In Hotels und Gastronomie dienen Roboter als Lieferservice oder Kellner, die Getränke und Speisen zu den Gästen bringen, oder als Concierge-Roboter in der Lobby, die Auskünfte geben. Auch Serviceroboter in der Pflege werden erprobt – etwa Roboter, die in Altenheimen Essen und Medikamente verteilen oder als intelligente Gehhilfen dienen. Im Einzelhandel und auf Messen sieht man gelegentlich Roboter, die als mobile Informationsstände fungieren, Kunden begrüßen oder Produkte präsentieren. Kurzum: Serviceroboter übernehmen oft Arbeiten, die monoton, zeitaufwändig oder für Menschen unbequem sind, sowie Aufgaben, bei denen sie den menschlichen Service ergänzen (z.B. 24/7-Verfügbarkeit für Routinewege). Dabei steht häufig die Interaktion mit Menschen im Vordergrund – sei es durch Sprache, durch ein Display zur Anzeige von Informationen oder durch einfache soziale Signale (Gestik, leuchtende Augen etc.), um für den Menschen verständlich und akzeptiert zu sein.
Besondere Merkmale: Serviceroboter müssen in der Regel mobil sein, um sich frei bewegen zu können, und autonom navigieren – das heißt, sie verfügen über Antriebe (Räder, Ketten oder auch Beine) und Navigationssoftware, um z.B. durch Gebäude zu fahren ohne anzustoßen. Sie sind oft kleiner und leichter gebaut als Industrieroboter, da sie in menschlicher Umgebung sicher sein müssen. Viele Serviceroboter haben ein freundliches Design, manchmal mit einem „Gesicht“ oder einer stilisierten menschlichen Form, um die Akzeptanz zu erhöhen. Technisch setzen sie auf Akkubetrieb, Funkkommunikation (WLAN) für Anbindung an Gebäudesysteme oder Cloud-Dienste, und häufig auf Künstliche Intelligenz für Spracherkennung oder Objekterkennung, damit sie auf komplexe Anweisungen reagieren können. Ein Serviceroboter muss deutlich vielseitiger sein als ein Industrieroboter – während Letzterer z.B. immer denselben Schweißpunkt setzt, muss ein Serviceroboter etwa im Hotel verschiedene Zimmer finden, einen Aufzug benutzen oder mit wechselnden Personen kommunizieren können. Diese Vielseitigkeit stellt hohe Anforderungen an Software und Sensorik.
Beispiel: Ein populärer Serviceroboter ist „Pepper“ von SoftBank Robotics. Pepper ist ein etwa 1,20 m großer humanoider Roboter auf einer rollenden Basis. Er wurde speziell für die Interaktion mit Menschen entwickelt: Pepper kann Gesichter erkennen, einfache Gespräche führen und auf einem integrierten Tablet Informationen anzeigen. Eingesetzt wird er zum Beispiel als Empfangs- und Auskunftsroboter in Banken, Einkaufszentren oder Museen. In einem Pilotprojekt begrüßte Pepper etwa Kunden in einer Bankfiliale und beantwortete häufige Fragen zu Dienstleistungen. Ein anderes alltägliches Beispiel für Serviceroboter ist der Saugroboter (z.B. der iRobot Roomba): Dieser kleine runde Roboter fährt autonom durch Wohnung oder Büro, weicht Möbeln aus, saugt Staub und Schmutz ein und kehrt selbstständig zur Ladestation zurück. Beide Beispiele verdeutlichen, wie Serviceroboter den Menschen im Alltag unterstützen – Pepper durch Informationsservice und Unterhaltung, Roomba durch selbstständige Hausarbeit.



Medizinische Roboter
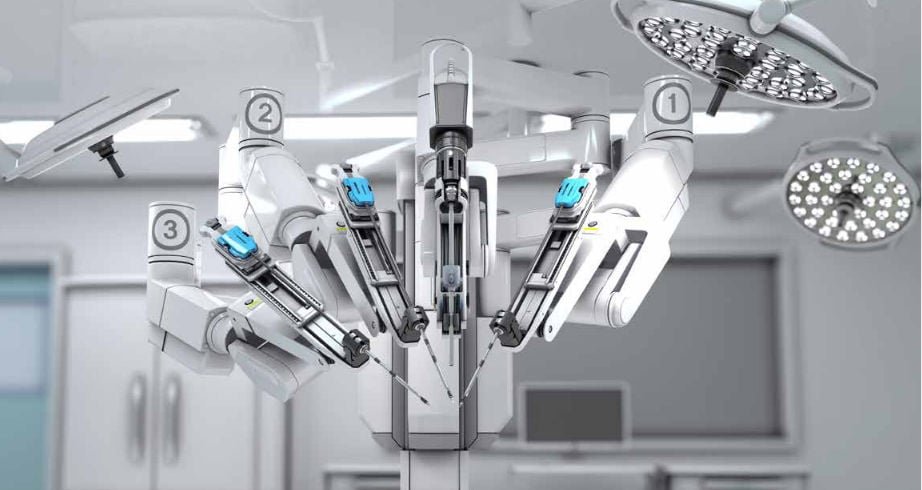
Medizinische Roboter (auch Medizinroboter genannt) sind spezialisierte Serviceroboter, die im Gesundheitswesen zum Einsatz kommen. Sie unterstützen Ärzte, Pflegepersonal und Patienten bei medizinischen Aufgaben, die höchste Präzision oder besondere Sorgfalt erfordern. Die Bandbreite reicht von Chirurgierobotern, die bei Operationen eingesetzt werden, über Rehabilitationsroboter für Therapiezwecke bis hin zu Logistikrobotern in Krankenhäusern, die z.B. Medikamente oder Proben transportieren. Medizinische Roboter sind meist darauf ausgelegt, entweder ferngesteuert (teleoperativ) vom Arzt bedient zu werden oder hochzuverlässig autonom Routineaufgaben zu erledigen. Ihre Funktionsweise kombiniert fortschrittliche Robotik mit medizinischer Technologie: So verfügen Chirurgie-Roboter über feinste Instrumente, die minimalinvasive Eingriffe ermöglichen, während Reha-Roboter Bewegungen von Gliedmaßen führen und dabei Kräfte genau dosieren, um einen Heilungsprozess zu unterstützen.
Einsatzgebiete: In Operationssälen kommen Roboterassistenzsysteme zum Einsatz, etwa bei komplexen laparoskopischen Operationen (Schlüssellochchirurgie). Der Roboter ermöglicht es dem Chirurgen, Instrumente mit einer Präzision zu führen, die menschliche Hände kaum erreichen – z.B. können zitterungsfreie Bewegungen im Millimeterbereich realisiert werden. Darüber hinaus werden Roboter in der Orthopädie verwendet, um bei Gelenkoperationen Schnitte exakt zu positionieren, oder in der Neurochirurgie, um Sonden punktgenau ins Gehirn einzuführen. Rehabilitationsroboter finden sich in Kliniken und Therapiezentren: Zum Beispiel Exoskelett-Roboter, die gelähmten oder gehbehinderten Patienten das Wiedererlernen von Gehbewegungen ermöglichen, indem sie die Beine mechanisch führen. Pflegeroboter gibt es experimentell in der Altenpflege, die beim Umlagern von Patienten helfen oder als Telepräsenzroboter die Kommunikation mit Ärzten erleichtern. Zudem gibt es in Krankenhäusern autonome Transportroboter, die sterile Güter, Medikamente oder Bettwäsche durch die Gänge fahren, um dem Personal Laufwege abzunehmen. Ein weiteres Feld sind Diagnostikroboter und medizinische Assistenzsysteme – zum Beispiel Robotersysteme, die Ultraschalluntersuchungen automatisiert durchführen oder Proben analysieren.
Besondere Merkmale: Roboter in der Medizin müssen extrem zuverlässig und präzise sein, da Menschenleben davon abhängen. Sie sind oft mit redundanten Sicherungssystemen ausgestattet (mehrfache Sensorik, Notabschaltungen, Backup-Stromversorgung), um Risiken zu minimieren. Chirurgieroboter arbeiten in Echtzeit unter Kontrolle eines Arztes – hierbei übersetzt das System die Handbewegungen des Operateurs an einer Konsole in fein skalierten Instrumentenbewegungen am Patienten. Ein wichtiger Aspekt ist die verstärkte Wahrnehmung: Kameras liefern hochauflösende, vergrößerte 3D-Bilder aus dem Körperinneren, und der Roboterarm führt die Instrumente an Stellen, die direkt für den Menschen unzugänglich wären. Reha-Roboter und Pflegeassistenten hingegen sind darauf ausgelegt, sanft mit dem Patienten umzugehen – sie erkennen z.B. Widerstand oder Schmerzen und passen Kraft sowie Bewegung entsprechend an. Viele medizinische Roboter sind modular aufgebaut, damit sie unterschiedliche Instrumente oder Aufsätze nutzen können, je nach Eingriff oder Therapie.
Beispiel: Das wohl bekannteste medizinische Robotersystem ist der Da-Vinci-Operationsroboter. Dieses System, bestehend aus mehreren robotischen Armen und einer Steuerkonsole, wird weltweit in Krankenhäusern für minimalinvasive Chirurgie eingesetzt. Bei einer typischen Anwendung – etwa einer Prostata-Operation – sitzt der Chirurg an der Konsole und steuert mit Joysticks und Pedalen die Instrumente, während eine Kamera einen vergrößerten Blick ins Operationsfeld gibt. Der Da-Vinci-Roboter setzt die Befehle mit solcher Präzision um, dass Schnitte und Nähte auf engstem Raum mit minimaler Verletzung des Gewebes möglich sind. Ein weiteres Beispiel sind exoskelettale Gehroboter wie der Lokomat: Dieses fest installierte Gerät in Reha-Kliniken hilft Patienten mit Gehbehinderungen, wieder das Laufen zu trainieren. Der Patient wird in ein stützendes Gestell geschnallt, und motorisierte Orthesen bewegen seine Beine in natürlicher Gangart auf einem Laufband – begleitet von therapeutischer Computersteuerung, die den Trainingsfortschritt anpasst.

Militär- und Sicherheitsroboter
Militärroboter und Sicherheitsroboter kommen überall dort zum Einsatz, wo Gefahren für den Menschen minimiert werden sollen – ob im Kriegsgebiet, bei der Bombenentschärfung oder zur Überwachung sensibler Bereiche. Diese Roboter sind speziell für robuste, oft gefährliche Umgebungen gebaut und können sowohl unbewaffnete Hilfsaufgaben als auch aktive Kampfhandlungen unterstützen. Man unterscheidet beispielsweise unbemannte Bodenfahrzeuge (UGV – Unmanned Ground Vehicles), unbemannte Fluggeräte (Drohnen/UAV – Unmanned Aerial Vehicles) und unbemannte maritime Systeme (für Operationen im oder unter Wasser). Ihre Funktionsweise reicht vom ferngesteuerten Betrieb – etwa wenn ein Soldat oder Polizist den Roboter aus sicherer Entfernung steuert – bis zu teilautonomen oder autonomen Fähigkeiten, bei denen die Maschine selbst Navigations- oder Zielerfassungsaufgaben übernimmt. Militär- und Sicherheitsroboter sind oft mit Kameras, Greifarmen, Spezialwerkzeugen oder sogar Waffen ausgerüstet, je nach Einsatzprofil.
Einsatzgebiete: Ein klassisches Einsatzgebiet ist die Bombenentschärfung. Polizei und Militär nutzen ferngesteuerte Roboter mit Kettenantrieb und Greifarm, um z.B. verdächtige Pakete zu untersuchen oder Sprengsätze zu entschärfen, ohne Menschen zu gefährden. Ebenso werden Roboter zur Aufklärung und Überwachung eingesetzt: Militärische Drohnen fliegen über feindliches Gebiet und liefern Live-Videobilder zur Lageerkundung, oder Bodenroboter fahren patrouillierend durch gefährliches Terrain (wie Tunnel oder Häuser) und scannen nach Fallen. In Kampfgebieten dienen Roboter auch als Transport- und Versorgungshelfer – etwa robotische Maultiere, die Munition oder Ausrüstung tragen, damit Soldaten entlastet werden. Zusätzlich gibt es erste bewaffnete Roboterplattformen, die mit Geschützen oder anderen Waffen ausgerüstet sind, um Ziele zu bekämpfen (dies meist unter menschlicher Aufsicht bzw. Freigabe, da vollkommen autonome Waffensysteme ethisch umstritten sind). Im Sicherheitssektor werden Roboter zur Geländeüberwachung und Objektsicherung genutzt: So gibt es mobile Überwachungsroboter, die z.B. nachts Lagerhallen oder Firmencampi autonom patrouillieren, mit Kameras Bewegungen registrieren und Alarm schlagen. Auch in der Brandbekämpfung oder bei chemischen Unfällen greifen Spezialeinheiten auf Roboter zurück – sogenannte Rettungs- und Sicherheitsroboter erkunden verseuchte oder brennende Bereiche, um z.B. Ventile zu schließen oder Opfer zu lokalisieren, bevor Menschen hineingehen.
Besondere Merkmale: Militär- und Sicherheitsroboter sind typischerweise sehr robust gebaut. Sie besitzen geländegängige Fahrwerke (Ketten, große Räder, oder auch Beine) für unebenes Terrain, stoßfeste Gehäuse und oft einen Allwetterschutz gegen Wasser, Staub oder extreme Temperaturen. Die Steuerung erfolgt häufig über eine sichere Funkverbindung, manchmal via Satellit bei Drohnen, um große Distanzen zu überbrücken. Viele Systeme verfügen über Echtzeit-Videoübertragung und Sensorik wie Infrarotkameras oder chemische Detektoren, damit die Bediener ein genaues Lagebild erhalten. Ein zentrales Merkmal ist die Sicherheit und Zuverlässigkeit – die Roboter müssen auch unter Beschuss oder bei Störungen noch funktionieren oder zumindest ausfallsicher abschalten. Einige dieser Roboter arbeiten halbautonom, d.h. sie können z.B. selbst Hindernissen ausweichen oder vordefinierten Routen folgen, ohne permanente Steuerbefehle. In brenzligen Situationen können sie auch opfern – im Notfall wird ein Roboter „geopfert“, um z.B. eine Mine auszulösen, anstatt dass ein Mensch zu Schaden kommt.
Beispiel: Ein bekannter Vertreter dieser Kategorie ist der Bombenentschärfungsroboter „PackBot“. Der PackBot, ursprünglich von iRobot (später Endeavor Robotics/FLIR) entwickelt, ist ein kleines Kettenfahrzeug, das mit einem manipulierbaren Arm und Kamera ausgestattet ist. Er wurde vielfach von der US-Armee und auch von zivilen Behörden genutzt, um Sprengfallen im Irak und in Afghanistan zu entschärfen oder in unsicheren Gebäuden Aufklärung zu betreiben. Der Bediener steuert den PackBot aus sicherer Entfernung, während der Roboter die gefährliche Arbeit verrichtet – beispielsweise kann er mit seinem Greifarm einen Sprengsatz aufheben und in einen sicheren Behälter legen. Ein anderes Beispiel aus Deutschland ist tEODor, ein von der Bundeswehr eingesetzter Entschärfungsroboter, der ebenfalls mit Greifarm und Kamera an Bord verdächtige Objekte untersucht und im Bedarfsfall unschädlich macht. Im Bereich der unbemannten Fluggeräte sei die Aufklärungsdrohne MQ-9 Reaper genannt – ein militärisches Drohnensystem, das aus großer Höhe tagelang überwachen und bei Bedarf mit Lenkwaffen eingreifen kann. Diese Beispiele zeigen, wie Roboter in Militär und Sicherheit risikoreiche Aufgaben übernehmen, um Menschenleben zu schützen.



Mobile Roboter
Mobile Roboter zeichnen sich dadurch aus, dass sie nicht an einem festen Standort operieren, sondern sich selbstständig fortbewegen können. Im Grunde umfasst diese Kategorie alle Robotersysteme mit Mobilität – von fahrerlosen Transportsystemen in Fabriken über autonome Saugroboter bis hin zu Drohnen. Da jedoch spezielle mobile Bereiche wie Unterwasser oder Raumfahrt gesondert behandelt werden, versteht man unter dem Begriff „mobile Roboter“ oft primär landgestützte Mobilroboter (am Boden) und allgemeine Mobilplattformen. Ihre Funktionsweise basiert auf Technologien wie autonomer Navigation, Lokalisierung und Kartenerstellung (SLAM), um sich in wechselnden Umgebungen zurechtzufinden. Mobile Roboter haben Antriebssysteme wie Räder, Ketten oder Beine und sind mit Sensoren (Laser-Scanner, Kameras, GPS, Inertialsensoren usw.) ausgestattet, um Hindernisse zu erkennen und ihren Weg zu planen. Wichtig ist, dass sie ihre Position kennen und dynamisch auf die Umgebung reagieren können – zum Beispiel einem plötzlich auftauchenden Hindernis ausweichen oder eine neue Route zum Ziel finden, falls der ursprüngliche Weg blockiert ist.
Einsatzgebiete: Ein zentrales Einsatzfeld ist die Logistik und Warenwirtschaft. In modernen Lagerhäusern kommen fahrerlose Transportfahrzeuge (FTF) oder Autonome Mobile Roboter (AMR) zum Einsatz, um Waren von A nach B zu bewegen. Ein bekanntes Beispiel sind die kleinen, flachen Transportroboter bei Amazon (ehemals Kiva-Roboter): Sie fahren unter Regale, heben diese an und transportieren ganze Warenregale selbstständig zum Kommissionier-Mitarbeiter. Ebenso finden mobile Roboter in Fabriken Verwendung, um Bauteile zwischen Produktionsstationen zu befördern, oder in Krankenhäusern, um Material und Essen auszuliefern. Im öffentlichen Raum begegnen uns mobile Roboter als Lieferroboter, etwa kleine kühlschrankartige Fahrzeuge auf Gehwegen, die Essenslieferungen oder Pakete zustellen. Auch autonome Fahrzeuge (selbstfahrende Autos, Busse) kann man als mobile Roboter betrachten, da sie mit Sensorik und KI eigenständig im Verkehr navigieren. Darüber hinaus werden mobile Roboter für Inspektionsaufgaben eingesetzt – z.B. Roboterfahrzeuge, die Kanalrohre von innen untersuchen, oder Roboter auf Ketten, die im Atomkraftwerk nach Störfällen radioaktive Bereiche erkunden. In Freizeitparks oder Museen existieren Roboterführer, die Besuchern nachfahren und Erklärungen geben. Die Vielfalt der Anwendungen ist enorm: Grundsätzlich überall dort, wo ein automatischer Helfer eine physische Bewegung im Raum ausführen kann, kommen mobile Roboter in Frage.
Besondere Merkmale: Das Hauptmerkmal mobiler Roboter ist die autonome Fortbewegung. Dazu benötigen sie einerseits Antrieb und Fahrwerk (z.B. Elektromotoren, Räder mit Gummireifen, bei Drohnen Rotoren, etc.) und andererseits Orientierungssinn. Oftmals kombinieren mobile Roboter verschiedene Sensordaten – etwa von Lidar (Laserscanner), Kameras und Odometrie – um sich ein Bild ihrer Umgebung zu machen. Sie erstellen in ihrem „Gehirn“ (der Bordsoftware) eine Karte der Umgebung und planen auf dieser Karte Routen. Gleichzeitig müssen sie in Echtzeit reagieren können: Wenn plötzlich ein Mensch den Weg kreuzt, muss der Roboter stoppen oder ausweichen. Viele mobile Roboter kommunizieren mit ihrer Infrastruktur: So können Transportroboter in Lagerhallen mit Aufzügen oder automatischen Türen verbunden sein, um diese zu öffnen, oder sie werden von einer Flottenmanagement-Software koordiniert, damit keine Kollisionen untereinander passieren. Ein weiteres Merkmal ist die Energieversorgung – mobile Roboter tragen meist Akkus und müssen regelmäßig geladen werden (manche kehren dafür autonom zur Ladestation zurück). Außerdem sind mobile Roboter oft modular, sodass verschiedene Aufbauten möglich sind: z.B. kann auf einer mobilen Basis je nach Bedarf ein Greifarm, ein Touchscreen oder ein spezielles Werkzeug montiert sein.
Beispiel: Ein eindrucksvolles Beispiel für mobile Roboter in der Logistik sind die Amazon-Transportroboter (ehemals Kiva). In Amazons Warenlagern navigieren hunderte dieser flachen, orangefarbenen Roboter selbstständig durch die Gänge. Jeder Roboter ist mit QR-Code-ähnlichen Markierungen am Boden oder anderen Navigationshilfen in der Halle orientiert. Sobald eine Bestellung hereinkommt, fährt ein Roboter unter das Regal mit den entsprechenden Produkten, hebt es leicht an und transportiert es zu einer Station, wo ein Mitarbeiter die Artikel entnimmt. Danach bringt der Roboter das Regal zurück an einen freien Platz. Dieses Schwarm-artige System hat die Effizienz in solchen Logistikzentren enorm gesteigert und zeigt, wie mobile Roboter Routinewege optimieren. Ein weiteres Beispiel sind autonome Lieferroboter in einigen Städten: Unternehmen testen kleine vierrädrige Roboter, die Lebensmittel bis vor die Haustür bringen. Sie navigieren auf dem Bürgersteig, überqueren Straßen an Fußgängerüberwegen und senden dem Kunden eine Nachricht, wenn sie ankommen. Dadurch wird die sogenannte „letzte Meile“ der Auslieferung automatisiert – der Roboter übernimmt den Part des Lieferfahrers auf kurzen Distanzen im Wohngebiet.



Humanoide Roboter
Humanoide Roboter sind Maschinen, die in ihrer Form oder ihren Bewegungsmöglichkeiten dem Menschen nachempfunden sind. Typischerweise verfügen sie über einen Rumpf mit zwei Armen, zwei Beinen und einem Kopf, sodass sie – zumindest theoretisch – ähnliche Aufgaben wie ein Mensch ausführen können und in einer für Menschen gebauten Umgebung zurechtkommen. Die Funktionsweise humanoider Roboter orientiert sich an menschlicher Motorik: Sie nutzen vielfältige Gelenke und Achsen, um Arme, Hände, Beine und ggf. Finger zu bewegen. Einige humanoide Roboter sind zweibeinig und können aufrecht gehen, was eine besondere technische Herausforderung darstellt, weil ständiges Balancieren nötig ist. Andere haben anstelle von Beinen Räder, behalten aber einen oberkörperähnlichen Aufbau. Humanoide Roboter sind oft Forschungsplattformen, um fortgeschrittene Themen wie Gleichgewichtskontrolle, Hand-Auge-Koordination oder soziale Interaktion zu erforschen. Darüber hinaus gibt es humanoide Roboter für Unterhaltungszwecke oder als Blickfang in Öffentlichkeitsarbeit, da ihre menschenähnliche Gestalt Aufmerksamkeit erregt.
Einsatzgebiete: Gegenwärtig sind vollwertige humanoide Roboter im praktischen Einsatz noch selten, da die Technologie komplex und teuer ist. Doch es gibt einige Anwendungen und viele Versuche. In der Robotik-Forschung dienen Humanoide dazu, Aufgaben des täglichen Lebens zu simulieren – etwa das Gehen auf unebenem Gelände, das Treppensteigen, das Öffnen von Türen oder das Greifen nach verschiedenen Objekten – um Lösungen zu entwickeln, die eines Tages in Haushalts- oder Pflegeassistenzrobotern genutzt werden können. In der Raumfahrt erprobt man humanoide Roboter (sogenannte Robonauten), die eines Tages Astronauten helfen könnten, indem sie Werkzeuge bedienen, Wartungsarbeiten durchführen oder Außenbord-Einsätze erledigen, wo ein menschenähnlicher Aufbau vorteilhaft ist. Einige humanoide Roboter werden in der Therapie und Pädagogik eingesetzt, z.B. als soziale Roboter für Autismus-Therapien, wo sie mit ihrem menschähnlichen Äußeren und vorhersehbaren Verhalten als Vermittler dienen. In der Unterhaltung gab es humanoide Roboter wie tanzen oder musizierende Roboter auf Bühnen, sowie Roboter-Maskottchen in Technikmuseen oder auf Messen, die Besucher begrüßen. Langfristig erhofft man sich, dass humanoide Roboter im Haushalt hilfreich sein könnten – zum Beispiel beim Aufräumen, Tragen von Gegenständen, oder sogar als Begleitung für ältere Menschen. Die Vision eines mechanischen Butlers oder Pflegers ist ein starker Antrieb in diesem Feld, auch wenn die aktuellen humanoiden Systeme noch weit davon entfernt sind.
Besondere Merkmale: Was humanoide Roboter technisch auszeichnet, ist die komplexe Kinematik. Sie besitzen häufig 20, 30 oder noch mehr Freiheitsgrade (d.h. einzelne bewegliche Gelenke oder Achsen), um annähernd die Beweglichkeit eines Menschen zu erreichen. Allein ein Roboterbein kann 6 oder 7 motorisierte Gelenke haben (Hüfte: 3 Achsen, Knie: 1, Knöchel: 2-3) und muss synchron mit dem anderen Bein und dem restlichen Körper bewegt werden, um zu laufen ohne umzufallen. Dazu kommen Sensoren wie Kreisel und Beschleunigungssensoren, die dem Roboter helfen, seine Lage im Raum zu spüren (für Balance) sowie Kameras und Mikrofone als „Augen“ und „Ohren“. Viele humanoide Roboter sind darauf ausgelegt, auch mit Menschen zu interagieren: Sie haben Lautsprecher und Sprachausgabe, manchmal ein Display als Gesicht oder leuchtende Augen, und Software für Sprachverarbeitung, um auf gesprochene Anweisungen zu reagieren. Die meisten humanoiden Roboter verwenden elektrische Antriebe (Motoren mit Getrieben); einige experimentelle Modelle nutzen auch pneumatische Muskeln oder hydraulische Systeme, um geschmeidigere Bewegungen oder höhere Kraft zu erzielen. Ein großes Problemfeld ist die Energiebereitstellung – ein autonom laufender humanoider Roboter verbraucht viel Energie, daher sind Akkulaufzeiten oft begrenzt, oder es wird eine Kabelverbindung genutzt in Laborumgebungen. Letztlich sind humanoide Roboter ein Kompromiss aus Mechanik, Elektronik und Informatik, um menschenähnliches Verhalten zu erreichen, und stellen damit eine der höchsten Herausforderungen in der Robotik dar.
Beispiel: Ein berühmtes Beispiel für einen humanoiden Roboter ist Honda’s „ASIMO“. ASIMO (entwickelt von Honda in den 2000er-Jahren) ist ein knapp 1,30 m großer zweibeiniger Roboter, der wie ein kleiner Raumfahrer aussieht. Er beherrscht das autonome Gehen auf zwei Beinen, kann Treppen steigen, Hindernissen ausweichen und sogar begrenzt rennen. ASIMO konnte Hände schütteln, Tabletts tragen und simple Handgriffe ausführen. Er wurde oft bei Vorführungen gezeigt – etwa servierte er bei Presse-Events Getränke oder trat in Technologie-Museen auf, um die Fähigkeiten der Robotik zu demonstrieren. Ein aktuelleres Beispiel für humanoide Robotik ist Atlas vom Unternehmen Boston Dynamics. Atlas ist ein fortschrittlicher, etwa 1,5 m großer Humanoid, der in Internetvideos durch seine beeindruckenden Fähigkeiten bekannt wurde: Er kann komplexe Parcours laufen, springen, sich abfangen, Objekte werfen und sogar einen Rückwärtssalto ausführen. Atlas ist allerdings ein Forschungsprototyp und wird (noch) nicht kommerziell eingesetzt – er dient vor allem dazu, die Grenzen der Bewegungssteuerung und Dynamik auszuloten. Beide Beispiele zeigen unterschiedliche Aspekte: ASIMO repräsentiert den humanoiden Roboter als freundlichen Assistenten, während Atlas das Potential an Beweglichkeit und Leistung demonstriert, das moderne Robotik erreichen kann.



Schwarmroboter
Schwarmroboter bilden eine besondere Kategorie, in der es weniger um die Fähigkeiten eines einzelnen Roboters geht, sondern um das koordinierte Verhalten vieler einfacher Roboter als Gruppe. Die Idee der Schwarmrobotik ist von sozialen Insekten wie Ameisen oder Bienen inspiriert: Viele kleine, relativ einfach gebaute Roboter agieren nach einfachen Regeln, interagieren miteinander und erreichen dadurch gemeinsam komplexe Ziele, die ein einzelner Roboter nicht schaffen könnte. Jeder Roboter im Schwarm besitzt in der Regel beschränkte Rechenleistung und einfache Sensoren; die Intelligenz entsteht aus der Masse und der Kommunikation untereinander. Die Funktionsweise von Schwarmrobotern beruht häufig auf Dezentralisierung – es gibt keine zentrale Steuerinstanz, stattdessen entscheidet jeder Mini-Roboter aufgrund lokaler Wahrnehmungen und eventuell einfachen Signalen seiner Nachbarn, was zu tun ist. Dadurch ist ein Roboterschwarm sehr fehlertolerant (wenn ein paar Einheiten ausfallen, funktioniert der Rest weiterhin) und flexibel (er kann sich an veränderte Bedingungen anpassen, z.B. das Schwarmgebiet erweitern oder verkleinern).
Einsatzgebiete: Viele Anwendungen von Schwarmrobotik sind noch im Forschungsstadium, aber es gibt klare Vorstellungen, wo diese Technik nützlich sein kann. Ein Szenario ist die Erkundung großer Gebiete – etwa die Oberfläche eines fremden Planeten oder Meeresbodens: Hier könnte eine Gruppe hunderter kleiner Roboter verteilt werden, die gemeinsam eine Karte erstellen oder nach bestimmten Objekten suchen, wobei sie untereinander die Aufgaben koordinieren. Ein anderer Bereich ist die Such- und Rettung: Nach einem Gebäudeeinsturz oder einer Naturkatastrophe könnten Schwärme kleiner Roboter in Trümmer vordringen, nach Überlebenden suchen oder Lagebilder liefern. In der Landwirtschaft wird diskutiert, dass anstelle eines großen Traktors in Zukunft viele kleine Feldroboter als Schwarm Unkraut jäten oder Pflanzen pflegen – so wäre die Bodenverdichtung geringer und die Maschinen könnten 24/7 in Schichten arbeiten. Auch in der Logistik könnten Schwärme von Robotern gemeinsam Lasten bewegen oder Paketverteilzentren autonom organisieren. Ein heute schon sichtbares Beispiel sind Drohnen-Schwärme, die zu Show-Zwecken koordiniert fliegen (beispielsweise Lichtshows am Nachthimmel mit hunderten von LED-Drohnen, die zusammen Bilder formen). Langfristig denkt man auch an militärische Drohnenschwärme, bei denen viele kleine Fluggeräte gemeinsam Ziele aufklären oder bekämpfen – diese Entwicklung ist allerdings umstritten und mit Vorsicht zu genießen.
Besondere Merkmale: Das Besondere an Schwarmrobotern ist das Skalieren der Anzahl: anstatt weniger großer Einheiten gibt es sehr viele kleine. Diese Minisysteme sind oft simpel gebaut – z.B. kleine runde Roboter mit zwei Rädern und ein paar Sensoren, oder winzige Drohnen. Jeder hat begrenzte Fähigkeiten, aber er kann mit seinen Nachbarn kommunizieren, etwa per Funk oder optischen Signalen. Die Software ist so gestaltet, dass globale Ziele durch lokale Regeln erreicht werden. Beispielsweise könnte die Regel sein: „Bewege dich Richtung Lichtsignal, halte Abstand zu deinen Nachbarn und wenn du ein Hindernis siehst, ändere die Richtung“ – wenn alle Roboter solche einfachen Regeln befolgen, entsteht eventuell ein geordnetes Muster oder sie umkreisen gemeinsam ein Objekt etc. Wichtig ist auch die Selbstorganisation: der Schwarm kann sich ohne externe Eingriffe organisieren, neue Aufgaben verteilen und auf Ausfälle reagieren. Die Herausforderung liegt oft in der Kommunikation – zu viel Abstimmung kann den Schwarm ineffizient machen, zu wenig führt zu Chaos. Daher werden Algorithmen der Schwarmintelligenz entwickelt, damit Roboterschwärme robust und effizient arbeiten. Ein weiterer Aspekt ist die Herstellung: Schwarmroboter sollen möglichst kostengünstig produzierbar sein, da man viele Exemplare benötigt. In der Praxis existieren Schwarmroboter häufig als Forschungsprototypen, wo bspw. 20, 50 oder 100 Miniroboter gemeinsam getestet werden.
Beispiel: Ein eindrucksvolles Beispiel stammt aus der Forschung: An der Harvard-Universität wurde ein Schwarm von 1000 Kleinstrobotern namens „Kilobots“ entwickelt. Jeder Kilobot ist nur münzgroß, hat drei kleine Beine zur Vibration Fortbewegung und kommuniziert optisch mit nahen Nachbarn. Alle 1000 Roboter zusammen wurden programmiert, um sich selbstständig zu formieren – so konnten sie beispielsweise gemeinsam ein vorgegebenes zweidimensionales Muster bilden (etwa ein bestimmtes Bild oder einen Buchstaben). Kein einzelner Roboter hatte die „Übersicht“, aber durch lokale Interaktionen schaffte es der Schwarm, die gewünschte globale Form anzunehmen. Dieses Experiment zeigte, dass Schwärme aus sehr vielen Robotern technisch beherrschbar sind. Ein anschaulicheres realweltliches Beispiel sind die Drohnen-Lichtshows, die z.B. bei großen Veranstaltungen oder im Fernsehen zu sehen sind: Hunderte leuchtende Drohnen fliegen synchron und erschaffen am Himmel bewegte Bilder oder Schriftzüge. Hier gibt es zwar meist eine zentrale Kontrolle, aber auch Prinzipien der Schwarmkoordination sind im Spiel, damit die Drohnen kollisionsfrei und gleichmäßig verteilt fliegen. Beide Beispiele demonstrieren, wie durch die Koordination vieler Einheiten Aufgaben erfüllt werden, die ein Einzelroboter nie leisten könnte – sei es eine komplexe Form darzustellen oder einen großen Raum gleichzeitig abzudecken.
Unterwasserroboter
Unterwasserroboter sind robotische Systeme, die unter Wasser operieren, sei es in Ozeanen, Seen oder anderen Gewässern. Diese Geräte werden häufig auch als Unterwasserfahrzeuge bezeichnet und lassen sich in zwei Haupttypen einteilen: ROVs (Remotely Operated Vehicles) und AUVs (Autonomous Underwater Vehicles). ROVs sind ferngesteuerte Tauchroboter, die über ein Kabel mit einem Schiff oder einer Basis verbunden sind. Sie erhalten darüber Energie und Steuerbefehle und senden im Gegenzug Kamerabilder und Sensordaten zurück. AUVs hingegen arbeiten autonom, ohne ständige Kabelverbindung – sie werden vorprogrammiert, bewegen sich selbständig und kehren später zurück, um die gesammelten Daten zu übermitteln (oder tauchen zum Senden auf). Die Funktionsweise von Unterwasserrobotern ist stark von der speziellen Umgebung geprägt: Unter Wasser ist die Kommunikation über Funk oder GPS kaum möglich und Sichtverhältnisse sind oft schlecht, daher nutzen die Roboter akustische Signalgebung (Schall) zur Kommunikation und Sonar zur Orientierung. Mechanisch müssen sie gegen Auftrieb, Strömungen und enormen Wasserdruck (in großen Tiefen) gewappnet sein. Unterwasserroboter haben typischerweise einen druckfesten Rumpf, elektrische Propellerantriebe oder Wasserstrahlantriebe zur Bewegung und sind in alle drei Raumrichtungen manövrierbar (vor/zurück, rauf/runter, drehen).
Einsatzgebiete: Die Meeresforschung ist ein großer Nutzer von Unterwasserrobotern. Wissenschaftler schicken ROVs in die Tiefsee, um Bereiche zu erkunden, die für Taucher unerreichbar sind, beispielsweise hydrothermale Quellen am Meeresgrund oder die Tiefseegräben. Kameras an Bord liefern Live-Bilder exotischer Tiefseekreaturen, Greifarme sammeln Proben vom Boden oder stellen Messgeräte auf. AUVs werden eingesetzt, um autonom große Gebiete zu kartieren – z.B. den Boden eines Sees oder Küstenabschnittes, indem sie Sonarscans durchführen und so eine Karte der Topografie erstellen. In der Offshore-Industrie (Erdöl- und Gasförderung) spielen Unterwasserroboter eine wichtige Rolle bei der Inspektion und Wartung von Unterwasserstrukturen: ROVs prüfen den Zustand von Bohrplattform-Fundamenten, Pipelines oder Kabeln auf dem Meeresgrund und können mit Werkzeugarmen Reparaturen oder Schalthandlungen durchführen. Auch in der Bergungstechnik (z.B. nach Schiffsunglücken) werden ROVs eingesetzt, um Wracks zu untersuchen oder Flugschreiber aus großen Tiefen zu holen. Selbst im Bereich Sicherheit/Militär gibt es Unterwasserroboter, z.B. zur Minensuche in Hafengebieten oder zur Überwachung. Ein weiteres spannendes Gebiet ist die Unterwasserarchäologie, wo Roboter dabei helfen, versunkene Städte oder Schiffswracks sorgfältig zu kartieren und Fundstücke zu bergen, ohne dass Menschen lange tauchen müssen. Letztlich ermöglicht die Robotik, dass auch die für Menschen unwirtliche Unterwasserwelt erforscht und genutzt werden kann.
Besondere Merkmale: Aufgrund der besonderen Bedingungen sind Unterwasserroboter extrem robust und wasserfest konstruiert. Ihre Hülle ist druckresistent – in 1000 Metern Tiefe lastet etwa 100 bar Druck, weshalb dickwandige Metallgehäuse oder spezielle druckausgleichende Ölkapselungen nötig sind. Die Beweglichkeit wird durch mehrere Propeller (Thruster) erreicht, die in verschiedene Richtungen ausgerichtet sind, um ein Schweben, Steigen, Sinken oder Seitwärtsfahren zu ermöglichen. Zur Navigation setzen Unterwasserroboter oft auf Trägheitsnavigation, Kompass und Tiefenmesser, ergänzt durch akustische Ortung (z.B. Pings an ein Mutterschiff, ähnlich einer Fledermaus-Echolotung, um Entfernung und Richtung zu ermitteln). Da GPS unter Wasser nicht funktioniert, muss ein AUV beim Auftauchen seine Position synchronisieren oder das Schiff verfolgt seinen Weg mit. Die ROVs sind über ihr Kabel (meist ein Glasfaserkabel mit Stahldrahtarmierung) permanent mit Energie versorgt und können daher sehr lange im Einsatz bleiben; AUVs dagegen haben Akkus und daher eine begrenzte Tauchdauer, typischerweise einige Stunden bis wenige Tage je nach Mission. Viele Unterwasserroboter besitzen robotische Greifarme oder Docking-Mechanismen, damit sie mit Objekten interagieren können – zum Beispiel Proben greifen, Ventile drehen oder Messinstrumente platzieren. Eine weitere technische Herausforderung ist die Sensorik: Kameras benötigen oft starke Scheinwerfer, da es in größerer Tiefe dunkel ist, und Sonar wird essentiell, um „sehen“ zu können, wenn die Sichtweite durch Partikel oder Lichtmangel gering ist.
Beispiel: Ein herausragendes Beispiel aus Deutschland ist das Tiefsee-ROV „KIEL 6000“ des GEOMAR-Instituts in Kiel. Dieses unbemannte Tauchfahrzeug kann – wie der Name andeutet – bis zu 6000 Meter tief tauchen und damit über 90% des Meeresbodens erreichen. An Bord hat KIEL 6000 mehrere Kameras, Scheinwerfer, zwei Greifarme und verschiedene Messsensoren. Über ein langes Kabel wird es von einem Forschungsschiff aus gesteuert. In einer typischen Mission wird KIEL 6000 eingesetzt, um hydrothermale Quellen in der Tiefsee zu untersuchen: Der Roboter taucht ab, navigiert knapp über dem Meeresgrund, während die Wissenschaftler an Bord des Schiffs die Kamera-Bilder in Echtzeit betrachten. Mit den Greifarmen kann er Gesteins- oder Wasserproben nehmen, die in speziellen Behältern an Bord gelagert werden. In einer Expedition im Pazifik wurde KIEL 6000 beispielsweise genutzt, um mögliche Folgen des Manganknollen-Abbaus zu erforschen – der Roboter entnahm in 4000 m Tiefe Sedimentproben und half, den Lebensraum am Boden zu kartieren. Dieses Beispiel zeigt die enormen Möglichkeiten der Unterwasserroboter: Ohne solch ein System wären Forschungen in solchen Tiefen für Menschen unmöglich oder sehr riskant. Neben ROV KIEL 6000 könnte man auch AUVs wie „Boaty McBoatface“ erwähnen – ein britisches autonomes Unterseeboot, das berühmt wurde, nachdem die Internetgemeinde seinen Namen wählen durfte, und das für lange wissenschaftliche Messfahrten unter dem antarktischen Eis eingesetzt wird.



Raumfahrtroboter
Raumfahrtroboter sind unbemannte robotische Systeme, die außerhalb der Erde – im Weltraum oder auf anderen Himmelskörpern – operieren. Sie spielen eine Schlüsselrolle in der Erforschung des Weltraums, da sie Aufgaben durchführen können, die für Astronauten zu gefährlich, zu teuer oder schlicht unmöglich wären. Man kann grob unterscheiden zwischen Orbitalrobotern (Robotik im Erdorbit oder an Raumstationen) und planetaren Robotern (Landefahrzeuge oder Rover auf Planeten, Monden, Asteroiden). Die Funktionsweise dieser Roboter variiert je nach Typ: Manche sind fahrende Rover, die wie ferngesteuerte Autos über eine Oberfläche rollen, andere sind stationäre Lander mit Greifarmen, wieder andere sind Roboterarme an Raumsonden oder Raumstationen, die als verlängerter Arm der Astronauten dienen. Allen gemein ist, dass sie unter harschen Bedingungen arbeiten – etwa Vakuum, extreme Temperaturen, kosmische Strahlung – und in großer Distanz zur Erde, meist mit einem immensen Zeitverzug in der Kommunikation (ein Funksignal zum Mars kann z.B. 10 Minuten brauchen). Daher müssen Raumfahrtroboter oft eine gewisse Autonomie besitzen und äußerst zuverlässig sein, da Reparaturen vor Ort kaum möglich sind.
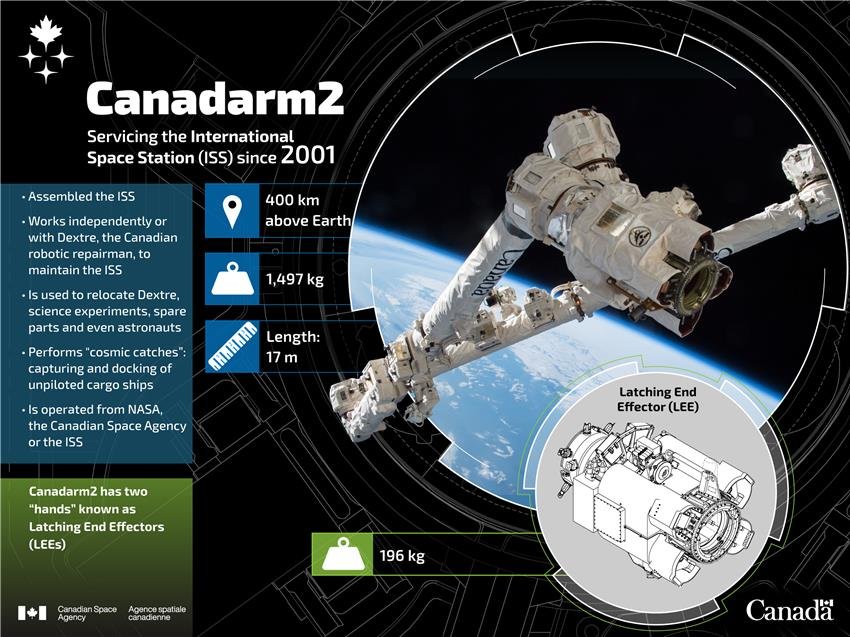
Einsatzgebiete: Die bekanntesten Raumfahrtroboter sind die Planetenrover auf dem Mars. Seit den 1990er Jahren erforschen Rover wie Sojourner, Spirit und Opportunity, Curiosity und aktuell Perseverance die Marsoberfläche. Sie fahren durch das Gelände, analysieren Gestein mit wissenschaftlichen Instrumenten, nehmen Bodenproben und schicken Daten sowie Fotos zurück zur Erde. Ein anderes Feld sind die Robotik an Raumstationen: Die Internationale Raumstation ISS verfügt z.B. über den großen kanadischen Roboterarm „Canadarm2“, der Außenlasten greifen, Module bewegen oder bei Außenbordarbeiten als Kran für Astronauten dienen kann. An der Außenseite der ISS arbeiten auch kleine autonome Roboter wie Astrobee – das sind würfelförmige Fluggeräte im Inneren der Station, die autonom schweben und Inventur oder Routineinspektionen durchführen. In der Mond- und Planetenforschung werden neben Rovern auch Lander eingesetzt, z.B. setzte die ESA die Sonde Philae auf einem Kometen ab, ausgestattet mit einem Bohrer und Laboreinheit. Die NASA schickte den Roboter InSight zum Mars, um dort mit einem mechanischen Maulwurf die Bodentemperatur zu messen. Sogar im Orbit um andere Planeten gibt es Robotik: Die Sonde Voyager oder die Jupiter-Sonde Juno sind zwar nicht mobil, aber tragen robotische Instrumente und Antennen, die ausgerichtet werden. Zusammengefasst erfüllen Raumfahrtroboter Aufgaben wie Erkunden, Proben sammeln, Infrastruktur aufbauen (in Zukunft vielleicht Mond-Basen), Wartung und Reparatur von Satelliten (konzeptionell geplant mit robotischen Servicer-Satelliten) und vieles mehr – praktisch jede unbemannte Raumfahrtmission beruht auf Robotersystemen.
Besondere Merkmale: Raumfahrtroboter sind technisch hochspezialisiert. Sie müssen extrem zuverlässig arbeiten, oft über Jahre hinweg, ohne dass Verschleißteile ausgetauscht werden können. Daher verwendet man langlebige Materialien und redundante Systeme. Die Energieversorgung erfolgt meist über Solarzellen und Batterien; einige weit entfernte Sonden und Marsrover (wie Curiosity, Perseverance) nutzen sogar Radioisotopenbatterien (RTGs), die durch Zerfall von Plutonium kontinuierlich Wärme und damit Strom liefern – weil Sonnenlicht nicht immer verfügbar oder stark genug ist. Rover sind mit Allradantrieb und speziellen Rädern für unwegsames Gelände ausgestattet; sie bewegen sich vergleichsweise langsam, um nicht zu stürzen oder stecken zu bleiben, und können selbstständig Navigationsentscheidungen treffen (z.B. einen großen Felsen umfahren). Raumfahrtroboter benötigen eine Strahlungshärtung für ihre Elektronik, damit kosmische Strahlung oder Sonnenstürme nicht die Computer beschädigen. Die Software ist ebenfalls stark abgesichert, oft gibt es Backup-Systeme, die übernehmen, falls ein Computer abstürzt. Ein wichtiges Merkmal ist die Kommunikation: Roboter im All haben Hochleistungsantennen, um über große Entfernungen mit der Erde zu kommunizieren, und müssen dazu oft exakt ausgerichtet werden. Mechanische Teile wie Roboterarme (z.B. an der ISS) oder Räder der Rover sind so konstruiert, dass sie im Vakuum ohne Schmierung laufen können und großen Temperaturschwankungen trotzen (auf dem Mond z.B. +120°C Tag, -150°C Nacht). Insgesamt ist jede Raumfahrtmission ein Meisterwerk der Robotik und Automatisierung, da während des Flugs und Einsatzes vieles automatisiert ablaufen muss – vom Landen mit Bremsraketen und Fallschirmen bis zum Bohren eines Gesteinskerns.
Beispiel: Ein prominentes Beispiel ist der Mars-Rover „Curiosity“ der NASA. Curiosity landete 2012 im Gale-Krater auf dem Mars und ist seitdem als autonomes Labor unterwegs. Der Rover hat die Größe eines Kleinwagens, sechs Räder und einen beweglichen Roboterarm. Auf diesem Arm befindet sich unter anderem ein Bohrer sowie ein Spektrometer, um Gesteinsproben zu analysieren. Curiosity navigiert tagein, tagaus über sandige Dünen und felsiges Terrain, nimmt Fotos auf, führt chemische Analysen des Marsbodens durch und sucht nach Spuren früheren Lebens. Er ist mit zahlreichen Kameras ausgestattet – darunter Navigationskameras, HazCams (für die unmittelbare Umgebung) und die MastCam auf einem Mast – um sowohl die Fahrt sicher zu gestalten als auch wissenschaftlich verwertbare Panoramabilder zu liefern. Curiosity arbeitet vollkommen autonom im Sinne von: Die Ingenieure auf der Erde schicken ihm Kommandos oder Wegpunkte, und der Rover entscheidet selbständig, wie er dorthin fährt, wann er Hindernisse umfährt und führt Messungen durch. Alle paar Tage sendet er die gesammelten Daten zurück, die dann ausgewertet werden. Curiosity hat bereits viele wichtige Entdeckungen gemacht, z.B. Hinweise auf ehemalige Gewässer auf dem Mars gefunden. Das Beispiel verdeutlicht, wie Raumfahrtroboter als Stellvertreter der Menschen ferne Welten erkunden. Ein weiteres Beispiel ist der Roboterarm Canadarm2 an der ISS: Dieser 17 Meter lange Arm wurde genutzt, um schwere Solarpanels und Module der Raumstation zu installieren. Astronauten steuern ihn via Laptop und Kamerabildern, und dank feinfühliger Gelenke kann der Arm sogar Raumschiffe einfangen (z.B. ankommende Transportkapseln) und an die Andockstellen manövrieren. Damit fungiert Canadarm2 quasi als „bauarbeiterischer“ Roboter im Orbit.


Agrarroboter
Agrarroboter (Landwirtschaftsroboter) sind Robotersysteme, die in der Landwirtschaft und Tierhaltung eingesetzt werden, um Arbeiten auf dem Feld oder im Stall zu automatisieren. Die Landwirtschaft steht seit einigen Jahren vor einem Technologiewandel unter dem Schlagwort Landwirtschaft 4.0, und Robotik spielt darin eine große Rolle. Agrarroboter übernehmen Aufgaben wie Pflanzenpflege, Aussaat, Ernte, Unkrautbekämpfung, Überwachung von Feldern oder Versorgung von Nutztieren. Ihre Funktionsweise kombiniert oft Robotik mit moderner Sensorik und KI: Viele Agrarroboter nutzen GPS für die Navigation auf dem Feld, Kameras und Bildverarbeitung um Pflanzen oder Unkraut zu erkennen, und greifen auf umfangreiche Daten (Bodenfeuchte, Wetter, Wachstumskarten) zurück, um Entscheidungen zu treffen. In Ställen verwenden Roboter Sensoren, um z.B. Kühe individuell zu erkennen und Futter bedarfsgerecht zu dosieren. Agrarrobotik gibt es sowohl als autonome Maschinen (etwa ein Roboter, der eigenständig über das Feld fährt) als auch als feste Installationen (z.B. ein Roboterarm in einer Melkstation).
Einsatzgebiete: Auf dem Ackerfeld kommen Agrarroboter z.B. als Pflanzroboter zum Einsatz, die bei der Aussaat helfen, indem sie jede Samenkörner exakt platzieren und gleichzeitig den Boden analysieren. Unkrautroboter fahren zwischen den Reihen und jäten mechanisch oder mit präzisen Mikrodosierungen von Herbiziden genau dort, wo Unkraut erkannt wird – dadurch kann man auf großflächige Spritzmittel verzichten und trotzdem effektiv Unkraut bekämpfen. Ernteroboter sind ein weiteres Feld: In Gewächshäusern gibt es Roboter, die Tomaten oder Gurken pflücken; in Obstplantagen experimentiert man mit Robotern, die z.B. reife Äpfel oder Erdbeeren erkennen und behutsam ernten. Diese Systeme entlasten von sehr arbeitsintensiven Prozessen, insbesondere wenn Arbeitskräfte fehlen. Ein großes Anwendungsfeld sind Agrardrohnen: Kleine unbemannte Fluggeräte überwachen Felder von oben, erstellen genaue Karten des Pflanzenwachstums, erkennen Schädlingsbefall oder Trockenstress und können sogar punktgenau Sprüheinsätze durchführen (präzise Düngung oder Pestizid nur an betroffenen Stellen). In der Viehwirtschaft sind Melkroboter weit verbreitet: In vielen Milchviehbetrieben gehen die Kühe freiwillig in eine automatische Melkstation. Dort übernimmt ein Roboterarm das Ansetzen der Melkbecher an das Euter der Kuh – gesteuert von Kameras oder Laser zur Zitzenfindung – und melkt das Tier vollautomatisch. Anschließend werden Daten zur Milchmenge und -qualität erfasst, und das System füttert die Kuh als Anreiz. Neben dem Melken gibt es Fütterungsroboter, die automatisch Futter anmischen und entlang der Futtertröge verteilen, sowie Stallroboter wie automatische Entmistungssysteme (kleine Schieberoboter, die durch den Stall fahren und den Boden säubern) oder Strohverteilungsroboter, die für frische Einstreu sorgen. Somit decken Agrarroboter praktisch alle Bereiche ab: Bodenbearbeitung, Pflanzenaufzucht, Ernte und Tierpflege.
Besondere Merkmale: Agrarroboter müssen robust sein und in wechselnden Außenbedingungen funktionieren – von Hitze und Staub bis Nässe und Kälte. Viele Feldroboter sind elektrisch betrieben, zunehmend mit Solarpanels unterstützt, um umweltfreundlich und leise zu arbeiten. Sie verfügen über großflächige Geländesensorik: GPS für Positionierung bis auf wenige Zentimeter genau (oft via RTK-GPS), Lidar oder Stereokameras, um Hindernisse wie Baumstümpfe oder Tiere auf dem Feld zu erkennen, und Bodensensoren, um die Beschaffenheit zu spüren (Härte, Feuchtigkeit). Ein Merkmal ist die Präzision: In der sogenannten Präzisionslandwirtschaft sollen Roboter z.B. exakt nur dort düngen, wo Bedarf besteht, oder Zentimeter-genau in bestehenden Pflanzreihen navigieren, ohne die Nutzpflanzen zu beschädigen. Das erfordert eine Kombination aus Sensorik und intelligenten Algorithmen. Auch Künstliche Intelligenz wird viel eingesetzt – beispielsweise um in Echtzeit Pflanzen von Unkraut zu unterscheiden anhand von Kamerabildern (Mustererkennung) oder um den Gesundheitszustand von Tieren anhand ihres Verhaltens zu bewerten. Ein anderes Merkmal ist die Skalierbarkeit: Agrarroboter sollen entweder sehr groß und leistungsstark sein (etwa autonome Traktoren für weite Flächen) oder in Schwärmen auftreten (viele kleine Roboter erledigen parallel Aufgaben). Bei Stallrobotern steht die Sicherheit und Tierwohl im Vordergrund – die Maschinen müssen sanft und stressfrei mit den Tieren umgehen, z.B. beim automatischen Melken ist es wichtig, dass die Kuh ruhig bleibt und nicht verletzt wird. Daher sind solche Roboter mit weichen Polstern, abgerundeten Kanten und Notabschaltungen ausgestattet.
Beispiel: Ein bekanntes Beispiel im Bereich Tierhaltung ist der Melkroboter „Lely Astronaut“. Dieses System, das in vielen Milchviehbetrieben weltweit im Einsatz ist, ermöglicht es Kühen, sich quasi selbst melken zu lassen. Der Roboter erkennt mittels eines Transponders die Kuh, öffnet ein Tor zur Melkstation und säubert zunächst automatisch das Euter. Dann lokalisiert ein lasergeführter Arm die Zitzen und setzt die Melkbecher an. Während des Melkens wird die Milchmenge je Viertel erfasst, und Sensoren prüfen die Milchqualität (z.B. Leitfähigkeit, um Anzeichen von Euterentzündungen früh zu erkennen). Die Kuh erhält währenddessen Futter im Roboter, um sie abzulenken und zu belohnen. Nach dem Melkvorgang öffnet sich das Tor und die Kuh verlässt den Melkstand. Dieses vollautomatische System erlaubt es Landwirten, den Melkvorgang rund um die Uhr ohne manuelle Arbeit durchzuführen und zugleich detaillierte Daten über jedes Tier zu sammeln. Ein anderes Beispiel auf dem Feld ist der Hackroboter von Naïo Technologies (ein europäischer Hersteller): Dieser leichte, elektrisch betriebene Roboter fährt autonom durch Gemüsefelder und entfernt Unkraut mechanisch mit seinen Hackwerkzeugen zwischen den Pflanzenreihen. Er navigiert per GPS und Kamera, erkennt Kulturpflanzen und Unkraut und arbeitet so präzise, dass Chemikalien eingespart werden. Solche Agrarroboter demonstrieren das Potential, Landwirtschaft effizienter und nachhaltiger zu gestalten – sie übernehmen anstrengende oder repetitive Aufgaben und ermöglichen einen gezielteren Ressourceneinsatz, während der Landwirt mehr Zeit für Überwachung und Management hat.



Fazit: Die Welt der Robotik ist äußerst vielfältig und entwickelt sich rasant weiter. Von stählernen Fabrikarmen über charmante Servicehelfer bis zu autonomen Explorationsmaschinen in Tiefsee und All – jede Roboterart ist auf ihre spezielle Umgebung und Aufgabe zugeschnitten. Dennoch greifen viele Technologien ineinander: Fortschritte in der KI, Sensorik und Antriebstechnik kommen allen Robotertypen zugute. Für eine technisch interessierte Leserschaft ist es faszinierend zu sehen, wie diese unterschiedlichen Robotersysteme funktionieren und welchen Nutzen sie stiften. Ob es darum geht, die Produktivität zu steigern, Menschen zu unterstützen oder völlig neue Horizonte zu erschließen – Roboter sind aus modernen Anwendungen nicht mehr wegzudenken und werden in Zukunft wohl noch vielfältiger und allgegenwärtiger werden. Jede der hier vorgestellten Roboterarten leistet auf ihrem Gebiet einen wichtigen Beitrag und steht exemplarisch für den Einfallsreichtum, mit dem Ingenieure die Herausforderungen unserer Welt angehen.