Die Architektur der unsichtbaren Maschinen: IST-Stand Nanoroboter
Die technologische Entwicklung der Menschheit hat eine Grenze erreicht, an der die bloße Miniaturisierung bestehender Systeme nicht mehr ausreicht, um die Herausforderungen der Zukunft zu bewältigen. Die Nano-Robotik, ein interdisziplinäres Forschungsfeld an der Schnittstelle von Nanotechnologie, Robotik, Materialwissenschaften und Molekularbiologie, markiert den Übergang von passiven Nanomaterialien zu aktiven, steuerbaren Maschinen im Nanometerbereich. Diese Maschinen, deren Komponenten eine Größe von 1 bis 100 Nanometern aufweisen, operieren in einer Dimension, in der ein einzelner Nanometer lediglich einem Milliardstel Meter entspricht – etwa dem Zehnfachen des Durchmessers eines Wasserstoffatoms. Die Relevanz dieser Technologie erstreckt sich über die gezielte Krebstherapie und minimalinvasive Chirurgie bis hin zur Umweltsanierung und der Erschaffung intelligenter, selbstheilender Materialien.
Inhalt
Physikalische Grundlagen und die Dynamik des Nanokosmos
Um die Funktionsweise von Nanorobotern zu verstehen, ist eine Abkehr von den intuitiven physikalischen Gesetzen der makroskopischen Welt erforderlich. Während großskalige Roboter primär durch Trägheitskräfte und Newtonsche Mechanik beeinflusst werden, unterliegen Nanoroboter den Gesetzen der Quantenmechanik und der statistischen Thermodynamik. Die physikalischen Herausforderungen der Nanowelt lassen sich im Wesentlichen in drei Kategorien unterteilen: die Dominanz der Viskosität über die Trägheit, der Einfluss der Brownschen Molekularbewegung und die signifikanten Oberflächenkräfte.
Hydrodynamik bei niedrigen Reynolds-Zahlen
Eines der fundamentalen Konzepte der Strömungslehre, die Reynolds-Zahl „Re“, definiert das Verhältnis von Trägheitskräften zu Zähigkeitskräften. Sie berechnet sich nach der Formel:
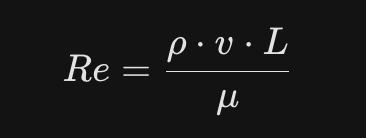
Hierbei repräsentiert „p“ die Dichte des Mediums, „v“ die Geschwindigkeit des Objekts, „L“ die charakteristische Länge und „u“ die dynamische Viskosität. Für einen Nanoroboter, der sich in einer wässrigen Lösung oder im Blut bewegt, ist die Reynolds-Zahl extrem niedrig, oft im Bereich von 10-4 bis 10-6. In diesem Regime sind Trägheitsmomente vernachlässigbar. Dies bedeutet, dass eine Maschine sofort zum Stillstand kommt, sobald die Antriebskraft aussetzt. Ein Vorwärtsschwimmen durch reziproke Bewegungen – wie das Schlagen eines menschlichen Beins im Wasser – ist physikalisch unmöglich, da die Vorwärtsbewegung durch die identische Rückwärtsbewegung neutralisiert würde (das sogenannte Scallop-Theorem). Erfolgreiche Fortbewegungsstrategien müssen daher die Zeitumkehr-Symmetrie brechen, was häufig durch helikale (korkenzieherartige) Rotationen oder flexible, peitschenähnliche Strukturen erreicht wird, die den Flagellen von Bakterien wie Escherichia coli nachempfunden sind.

Die Herausforderung des thermischen Rauschens
Ein weiteres prägendes Element ist die Brownsche Bewegung. Da Nanoroboter eine Masse haben, die vergleichbar mit den sie umgebenden Flüssigkeitsmolekülen ist, werden sie ständig durch thermische Kollisionen erschüttert. Diese zufällige Bewegung ist oft stärker als die gerichtete Kraft, die durch externe Steuerungsfelder aufgebracht werden kann. Die Navigation eines Nanoroboters gleicht somit dem Versuch, ein Blatt in einem heftigen Sturm präzise zu steuern. Moderne Forschungsansätze nutzen entweder statistische Methoden, um diese Zufallsbewegungen durch sogenannte „Brownsche Ratschen“ gerichtet zu kanalisieren, oder sie setzen auf massive externe Kraftfelder, insbesondere magnetischer Natur, um das thermische Rauschen zu übertönen.
Fertigungsverfahren: Zwischen Präzision und Skalierbarkeit
Die Herstellung von Maschinen, deren Bauteile auf molekularer Ebene präzise angeordnet sein müssen, erfordert Methoden, die weit über die konventionelle Mechanik hinausgehen. Die Forschung unterscheidet hierbei primär zwischen Top-Down- und Bottom-Up-Ansätzen sowie hybriden Systemen.
Top-Down-Verfahren: Lithografie und Nanostrukturierung
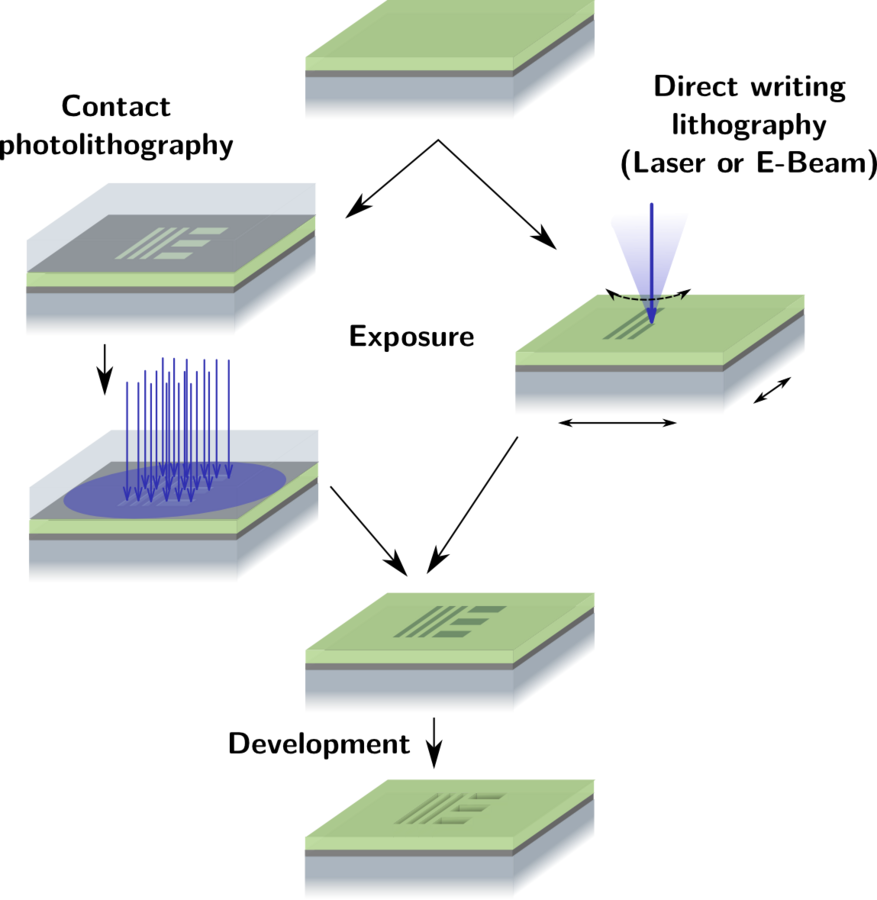
Top-Down-Verfahren nutzen externe Werkzeuge, um Strukturen aus größeren Materialblöcken herauszuarbeiten oder auf Oberflächen zu schreiben. Diese Techniken sind eng mit der Halbleiterfertigung verwandt.
| Verfahren | Auflösung | Funktionsweise | Limitierungen |
| Photolithografie | ~100 nm (konventionell) | Lichtempfindliche Resists werden durch Masken belichtet | Beugungsbegrenzung des Lichts; primär für 2D-Strukturen geeignet |
| Elektronenstrahllithografie (EBL) | < 2 nm | Ein fokussierter Elektronenstrahl schreibt Muster direkt in den Resist | Serieller Prozess; extrem zeitaufwendig und teuer; für Massenproduktion ungeeignet |
| Holografische Mikrolithografie | Nanometerskala | Strukturierung ganzer 3D-Volumina durch Interferenzmuster | Erfordert komplexe optische Setups; begrenzte Materialauswahl |
Obwohl Top-Down-Methoden eine hohe geometrische Freiheit bei der Gestaltung von anorganischen Komponenten wie Silizium-Strukturen bieten, sind sie oft inkompatibel mit biologischen Molekülen und stoßen bei der Erzeugung komplexer 3D-Strukturen mit interner Beweglichkeit an ihre Grenzen.
Bottom-Up-Verfahren: Molekulare Selbstassemblierung und DNA-Origami
Die Bottom-Up-Fertigung nutzt die intrinsischen chemischen Bindungskräfte von Atomen und Molekülen, um komplexe Strukturen autonom aufzubauen. Das prominenteste Beispiel hierfür ist das DNA-Origami. In diesem Prozess wird ein langer, einzelsträngiger DNA-Ring (Scaffold) durch hunderte kurzer, synthetischer „Klammerstränge“ (Staples) in eine hochspezifische Form gefaltet.
Die Vorteile der DNA-basierten Nanotechnologie sind vielfältig:
- Molekulare Adressierbarkeit: Jede einzelne Base der DNA-Sequenz kann als exakt definierter Ankerpunkt für funktionale Gruppen wie Enzyme, Fluoreszenzmarker oder metallische Nanopartikel dienen.
- Parallelität: In einer einzigen Lösung können Milliarden von Nanostrukturen simultan innerhalb weniger Minuten oder Stunden gefaltet werden.
- Biokompatibilität: Da DNA ein natürliches Biopolymer ist, sind diese Strukturen inhärent biologisch abbaubar und oft ungiftig.
Herausforderungen bestehen jedoch in der Stabilität gegenüber DNasen (enzymatischer Abbau) im menschlichen Blutkreislauf und der begrenzten mechanischen Festigkeit rein biologischer Komponenten.
Hybride Fertigung und Nanoprinting
Neuere Ansätze kombinieren die Stärken beider Welten. Durch das „Deterministic Positioning“ werden DNA-Origami-Strukturen mittels Lithografie auf anorganischen Substraten angeordnet. Dies ermöglicht die Schaffung von Schnittstellen zwischen der biologischen Welt (z. B. Proteinsensoren) und der elektronischen Welt (z. B. Transistoren). Ein weiterer Durchbruch ist das 3D-Printing im Mikromaßstab mittels Zwei-Photonen-Polymerisation, das es erlaubt, komplexe mechanische Bauteile wie Zahnräder oder Schrauben für Nanoroboter direkt aus flüssigen Harzen zu „drucken“.
Antriebstechnologien: Motoren der Nanowelt
Ein Nanoroboter ohne Antrieb ist lediglich ein passives Partikel, das der Diffusion unterworfen ist. Um zielgerichtete Aufgaben zu erfüllen, benötigt er einen Mechanismus zur Energieumwandlung in mechanische Bewegung.
Externe physikalische Felder: Magnetismus und Akustik
Die Nutzung externer Energiequellen ist derzeit der favorisierte Ansatz für medizinische Anwendungen in vivo, da er keine toxischen Brennstoffe benötigt und eine präzise Fernsteuerung ermöglicht.
- Magnetische Aktuierung: Dies ist die am weitesten entwickelte Methode. Nanoroboter werden mit ferromagnetischen Materialien (z. B. Nickel oder Eisenoxiden) dotiert. Ein externes, rotierendes Magnetfeld induziert eine Drehung. Bei helikalen Strukturen wird diese Rotation aufgrund der chiralen Form in eine translatorische Bewegung umgewandelt. Magnetfelder unter 3 Tesla gelten als gesundheitlich unbedenklich und können tief in menschliches Gewebe eindringen, ohne abgeschwächt zu werden.
- Akustische Felder: Ultraschallwellen können genutzt werden, um asymmetrische Strömungen (Acoustic Streaming) um einen Nanoroboter zu erzeugen, die ihn vorantreiben. Akustische Antriebe sind besonders biokompatibel, haben jedoch eine geringere Eindringtiefe und Richtungspräzision als magnetische Systeme.
Chemische Eigenpropulsion: Janus-Partikel und molekulare Ratschen
Chemisch angetriebene Roboter nutzen lokale Konzentrationsgradienten, um sich fortzubewegen. Ein klassisches Modell ist das Janus-Partikel, das auf einer Seite mit einem Katalysator (z. B. Platin) beschichtet ist. In einer Wasserstoffperoxid-Lösung ($H_2O_2$) zersetzt der Katalysator den Brennstoff zu Wasser und Sauerstoff. Der asymmetrische Ausstoß von Reaktionsprodukten erzeugt einen Vortrieb durch Selbstdiffusiophorese.
| Antriebstyp | Energiequelle | Vorteile | Nachteile |
| Magnetisch | Externes Feld | Treibstofffrei, hohe Eindringtiefe, präzise Steuerung | Erfordert komplexe externe Hardware (MRT oder Helmholtz-Spulen) |
| Chemisch | Umgebungsbrennstoff | Autonomer Antrieb, keine externe Feldquelle nötig | Oft toxische Brennstoffe ($H_2O_2$, Hydrazin); schwer zu steuern |
| Bio-hybrid | Glukose/ATP | Höchste Effizienz, Nutzung natürlicher Chemotaxis | Kurze Lebensdauer, Immunreaktionen möglich |
| Optisch | Laserlicht | Lokale Aktivierung, hohe Geschwindigkeit | Geringe Gewebepenetration, thermische Schäden möglich |
Molekulare Motoren, die chemische Energie in mechanische Arbeit umwandeln, erreichen Geschwindigkeiten von bis zu 30 nm/s, was mit natürlichen Motorproteinen vergleichbar ist. Ein Durchbruch gelang hierbei mit sogenannten „Burnt-Bridge“-Ratschen, bei denen ein Motor ein Substrat (z. B. RNA) enzymatisch abbaut und so eine Rückwärtsbewegung verhindert, was zu einer gerichteten Diffusion führt.
Medizinische Applikationen: Die Vision von „Fantastic Voyage“
Die Medizin ist das Hauptanwendungsgebiet der Nano-Robotik. Das Ziel ist eine Transformation von der heutigen „Gießkannen-Medizin“ hin zu einer präzisen, zellgenauen Intervention.
Gezielte Wirkstoffabgabe (Targeted Drug Delivery)
In der Onkologie ist die größte Einschränkung der Chemotherapie ihre systemische Toxizität. Nanoroboter können so programmiert werden, dass sie Wirkstoffe direkt am Tumor freisetzen, wodurch die benötigte Dosis drastisch gesenkt und Nebenwirkungen minimiert werden. Experimentelle DNA-Nanoroboter wurden bereits erfolgreich eingesetzt, um die Blutgefäße von Tumoren gezielt zu verstopfen (induzierte Thrombose), indem sie das Protein Thrombin nur bei Kontakt mit tumor-spezifischen Oberflächenmarkern freisetzen.


Neurologie und Mikrochirurgie: Der Bionaut-Ansatz
Ein besonders kritisches Feld ist die Behandlung von Gehirnerkrankungen, da die Blut-Hirn-Schranke viele Medikamente blockiert. Das Unternehmen Bionaut Labs entwickelt ferngesteuerte Mikroroboter („Bionauten“), die durch das Rückenmark oder den Liquorraum (Cerebrospinalflüssigkeit) bis tief in das Gehirn navigiert werden können.
Anwendungsgebiete der Bionauten-Technologie umfassen:
- Glioblastome: Lokale Abgabe von Chemotherapeutika wie Doxorubicin direkt in den Hirnstamm, um systemische Belastungen zu vermeiden.
- Hydrozephalus: Minimalinvasive Punktierung von Zysten oder Hindernissen im Liquorfluss als Alternative zu riskanten Shunt-Operationen.
- Neurodegeneration: Präzise Injektion von Stammzellen oder Gentherapien in tiefe Hirnstrukturen zur Behandlung von Parkinson oder Huntington.
Diagnostik und Sensorik in vivo
Nanoroboter könnten als permanente Überwachungssysteme fungieren. Diagnostic Nanobots sind in der Lage, Biomarker für Krankheiten in Konzentrationen von bis zu $10^{-15}$ molar zu detektieren – eine tausendfache Verbesserung gegenüber konventionellen Methoden. Dies würde eine Früherkennung von Krebs oder Infektionen ermöglichen, lange bevor klinische Symptome auftreten.
Umwelt- und Materialwissenschaften: Jenseits der Medizin
Obwohl die Medizin im Rampenlicht steht, bietet die Nano-Robotik auch Lösungen für ökologische und industrielle Herausforderungen.
Wasserreinigung und Mikroplastik-Remediation
Mikro- und Nanoplastikpartikel sind aufgrund ihrer geringen Größe mit herkömmlichen Filtermethoden schwer zu entfernen. Ein tschechisches Forscherteam von CATRIN hat Nanoroboter entwickelt, die aus Titandioxid-Nanoröhren bestehen und durch UV-Licht angetrieben werden. Durch „Atomic Engineering“ wurden Platin-Atome in die Struktur integriert, was den Robotern ermöglicht, Mikroplastikpartikel irreversibel einzufangen und sie für eine spätere magnetische Extraktion zu sammeln. Diese Roboter können 90% der Schadstoffe innerhalb weniger Minuten binden.
Selbstheilende Materialien und Carbon Fixation
Am MIT forscht die Gruppe um Michael Strano an nanobionischen Materialien, die von Pflanzen inspiriert sind. Sie haben Polymere entwickelt, die Kohlenstoffdioxid aus der Umgebungsluft extrahieren und mittels Sonnenlicht in ihre eigene molekulare Struktur einbauen. Diese Materialien können sich bei Beschädigung selbst heilen, indem sie „nachwachsen“, ähnlich wie ein Blatt einen Kratzer schließt. Dies könnte die Grundlage für zukünftige Baustoffe sein, die nicht nur CO2-neutral, sondern CO2-negativ sind.
Führende Forschungsinstitutionen und Pioniere
Die Nano-Robotik ist ein globales Forschungsfeld, wobei bestimmte Hubs durch ihre Innovationskraft herausragen.
ETH Zürich: Das Multi-Scale Robotics Lab (MSRL)
Geleitet von Professor Bradley Nelson, ist das MSRL die weltweit führende Institution für magnetisch gesteuerte Mikrosysteme. Nelson wurde für seine Beiträge zur Translation dieser Technologien in die klinische Anwendung in das AIMBE College of Fellows aufgenommen. Sein Labor hält den Weltrekord für den fortschrittlichsten medizinischen Mini-Roboter und hat maßgebliche Fortschritte bei der Steuerung von Kathetern und Implantaten mittels magnetischer Felder erzielt.
Max-Planck-Institut für Intelligente Systeme (Stuttgart/Heidelberg)
Professor Peer Fischer gilt als einer der Pioniere im Bereich der chiralen Nanopropeller. Seine Forschungsgruppe hat gezeigt, dass Nanoroboter in der Lage sind, sich durch das dichte Netzwerk des Glaskörpers im Auge zu bewegen, um Medikamente direkt an die Netzhaut zu liefern. Als Mitbegründer von Bionaut Labs treibt er die Kommerzialisierung dieser Systeme voran.
Harvard University: Wyss Institute for Biologically Inspired Engineering
Das Team um Peng Yin, William Shih und George Church fokussiert sich auf die Programmierung von Materie mittels DNA. Sie haben DNA-basierte Nanomaschinen entwickelt, die mechanische Aufgaben wie das Greifen und Transportieren von Molekülen übernehmen können. Ihre Arbeit an DNA-Barcodes zur Untersuchung zellulärer Interaktionen ist grundlegend für die nächste Generation der Diagnostik.
Massachusetts Institute of Technology (MIT)
Michael Strano ist führend auf dem Gebiet der Quantenmaterialien und der Pflanzen-Nanobionik. Seine Forschung zeigt, wie Nanoteilchen in lebende Pflanzen integriert werden können, um diese in biologische Sensoren für Sprengstoffe oder Schadstoffe zu verwandeln.
Wirtschaftliche Aspekte und Marktanalyse
Die Nano-Robotik wandelt sich von einer rein akademischen Disziplin zu einem signifikanten Wirtschaftsfaktor.
| Region / Marktsegment | Prognostizierte Marktgröße (2025) | CAGR (Wachstumsrate) |
| Globaler Gesamtmarkt | 11,2 Mrd. USD | 23,8% |
| USA Nanorobotics Markt | 3,9 Mrd. USD | 22,3% |
| Europa Nanorobotics Markt | 1,3 Mrd. USD | 18,1% |
| Medizinische Wirkstoffabgabe | – | Höchste Wachstumsrate erwartet |
Rund 78% der medizinischen Forscher gehen davon aus, dass Nanoroboter innerhalb des nächsten Jahrzehnts die gezielte Wirkstoffabgabe revolutionieren werden. Diese Zuversicht spiegelt sich in massiven Investitionen wider: Allein im Jahr 2024 flossen über 850 Millionen USD in die Erforschung der Nano-Robotik. Führende Pharmaunternehmen wie Roche, Pfizer und Johnson & Johnson haben bereits Nanotechnologie in über 58% ihrer aktiven Forschungs-Pipelines integriert.
Der aktuelle Forschungsstand: Von der Theorie zur Klinik (2024–2025)
In den Jahren 2024 und 2025 hat das Feld einen entscheidenden Sprung gemacht. Während viele Systeme bisher lediglich „Proof-of-Concept“-Studien in Zellkulturen waren, befinden sich nun die ersten Plattformen in der Phase der präklinischen Validierung an Großtiermodellen oder bereiten klinische Studien am Menschen vor.
Integration von Künstlicher Intelligenz
Ein zentraler Trend ist die Nutzung von KI zur Steuerung von Nanoroboter-Schwärmen. Da die manuelle Steuerung tausender einzelner Einheiten unmöglich ist, übernehmen KI-Algorithmen die Pfadplanung und Koordination. KI-gestützte Bildverarbeitung ermöglicht es zudem, Nanoroboter in Echtzeit mittels Ultraschall oder MRT zu verfolgen und ihre Bewegungen an die dynamischen Bedingungen im Körper (z. B. Blutfluss oder Atembewegungen) anzupassen.
Fortschritte in der Materialwissenschaft
Die Entwicklung von „weichen“ Nanorobotern (Soft Robotics) aus Hydrogelen oder synthetischen Polymeren hat an Bedeutung gewonnen. Diese Systeme sind weniger anfällig für mechanische Schäden an Gefäßwänden und können ihre Form ändern, um engere Passagen zu durchqueren. Die Verwendung von biologisch abbaubaren Materialien stellt sicher, dass die Maschinen nach getaner Arbeit einfach vom Stoffwechsel ausgeschieden werden.
Herausforderungen, Risiken und ethische Erwägungen
Trotz des enormen Potenzials stehen Forscher und Regulierungsbehörden vor signifikanten Hürden.
Technische und biologische Barrieren
Die größte technische Herausforderung bleibt die kontrollierte Bewegung gegen starke Strömungen im Gefäßsystem und die Überwindung der Brownschen Bewegung bei extrem kleinen Robotern (< 50 nm). Zudem stellt das Immunsystem eine Hürde dar: Nanoroboter müssen „getarnt“ werden (z. B. durch Beschichtung mit Zellmembranen oder Polyethylenglykol), um nicht vorzeitig von Makrophagen eliminiert zu werden.
Regulatorische und moralische Dilemmata
Die Einordnung von Nanorobotern in bestehende Zulassungsverfahren ist schwierig. Sind sie Medikamente oder Medizinprodukte? Die Grenze zwischen aktiven Nanomaterialien und Robotern ist fließend. Ethisch wird diskutiert, inwieweit die Autonomie dieser Systeme begrenzt werden muss, um unbeabsichtigte Schäden zu vermeiden. Es besteht zudem die Sorge vor einer „Nanotoxizität“, wenn anorganische Bestandteile langfristig im Gewebe verbleiben.
Zusammenfassende Analyse und Zukunftsausblick
Die Nano-Robotik ist keine ferne Zukunftsvision mehr, sondern eine reale technologische Kraft, die kurz vor der klinischen und industriellen Anwendung steht. Die Fähigkeit, Materie auf der Nanoskala zu manipulieren, wird es ermöglichen, chirurgische Eingriffe ohne Schnitte durchzuführen, Krebszellen individuell zu vernichten und Materialien zu erschaffen, die die Umwelt aktiv reinigen.
Zusammenfassend lässt sich der Stand der Technik wie folgt charakterisieren:
- Antrieb: Magnetische Systeme sind am weitesten fortgeschritten und stehen kurz vor dem klinischen Einsatz in der Neurologie.
- Herstellung: DNA-Origami ermöglicht eine beispiellose Präzision bei der Anordnung von Molekülen, während 3D-Nanoprinting komplexe mechanische Strukturen liefert.
- Führung: Die Kombination aus hochempfindlicher Sensorik und KI-gesteuerter Navigation bildet das „Gehirn“ der modernen Nanoroboter.
- Herausforderung: Biokompatibilität, Langzeit-Sicherheit und die Skalierung der Produktion bleiben die kritischen Engpässe für eine breite Markteinführung.
Die kommenden Jahre werden durch die Ergebnisse der ersten klinischen Studien geprägt sein. Sollten diese erfolgreich verlaufen, steht der Medizin ein Paradigmenwechsel bevor: vom groben Eingriff zur präzisen molekularen Reparatur. Die Nano-Robotik ist somit der Schlüssel zu einer Ära, in der Krankheiten nicht mehr nur verwaltet, sondern auf fundamentaler Ebene geheilt werden können.