Schwarmrobotik – Wenn Roboter im Schwarm gemeinsam handeln
Schwarmroboter: Ameisen, Bienen, Vögel – sie alle demonstrieren eindrucksvoll, was kollektive Intelligenz bewirken kann. Eine einzelne Ameise ist für sich genommen kein großes Wunderwerk an Intelligenz, doch ein ganzes Ameisenvolk kann Nester bauen, Nahrung finden und komplexe Aufgaben bewältigen, ohne dass eine zentrale Ameisen-“Chefin” jeden Schritt vorgibt. Ähnliches gilt für Bienenschwärme, die gemeinsam Entscheidungen über neue Nistplätze treffen, oder für Vogelschwärme, die in perfekter Formation am Himmel ziehen. Diese natürlichen Phänomene haben Ingenieure und Informatiker inspiriert, ein neues Feld der Robotik zu entwickeln: die Schwarmrobotik. Dabei geht es darum, dass viele einfache Roboter durch Zusammenarbeit Aufgaben lösen – ohne eine zentrale Steuerung, sondern allein durch lokale Interaktionen untereinander und mit der Umwelt. Schwarmrobotik verspricht robuste, flexible und skalierbare Lösungen für Aufgaben, an denen ein einzelner Roboter scheitern würde. In diesem Artikel geben wir einen umfassenden Überblick über die Prinzipien der Schwarmrobotik, ihre Vorteile, Anwendungen, Geschichte, technische Grundlagen, Software-Algorithmen, konkrete Beispielsysteme und einen Ausblick auf den aktuellen Stand und die Zukunft dieser faszinierenden Technologie.
Inhalt
- Kilobot
 Schwarmroboter im Taschenformat – Die Kraft der Vielen Kilobot, die enfesslung der vielen.… Kilobot weiterlesen
Schwarmroboter im Taschenformat – Die Kraft der Vielen Kilobot, die enfesslung der vielen.… Kilobot weiterlesen
Was ist Schwarmrobotik? – Prinzipien, Unterschiede zur klassischen Robotik und Vorbilder aus der Natur
Unter Schwarmrobotik versteht man einen Ansatz in der Robotik, bei dem anstelle eines einzelnen, komplexen Roboters ein Schwarm aus vielen vergleichsweise einfachen Robotern eingesetzt wird. Die Idee dahinter ist angelehnt an die Schwarmintelligenz in der Natur: Insektenkolonien, Fischschwärme oder Vogelschwärme zeigen, dass durch das Zusammenwirken vieler Individuen intelligentes Gesamthandeln entstehen kann, obwohl jedes einzelne Individuum nur begrenzte Fähigkeiten oder Informationen besitzt. In der Schwarmrobotik versucht man, solche kollektiven Verhaltensweisen künstlich nachzubilden.
Grundprinzipien: Jeder Roboter im Schwarm agiert autonom – es gibt keinen zentralen „Chefroboter“, der den anderen Befehle erteilt. Stattdessen folgt jeder einfachen Regeln und reagiert auf Reize aus der Umgebung und Signale seiner Nachbarroboter. Durch die lokale Kommunikation und Interaktion entstehen emergente Verhaltensmuster: Das Kollektiv der Roboter kann Aufgaben lösen oder Strukturen bilden, die weit über die Fähigkeiten der einzelnen Maschinen hinausgehen. Wichtig ist dabei, dass die Roboter dezentral koordiniert sind. Im Unterschied zur klassischen Robotik, wo oft ein zentraler Computer oder ein menschlicher Operator einen einzelnen Roboter (oder eine kleine Gruppe) steuert, setzt Schwarmrobotik auf Selbstorganisation. Das System als Ganzes steuert sich quasi „von unten“ selbst, ähnlich wie ein Ameisenstaat ohne zentrale Leitung auskommt.
Dieser Unterschied zur traditionellen Herangehensweise ist fundamental: Klassische Industrieroboter sind oft teure, hochpräzise Einzelgeräte, die genau programmierte Aufgaben ausführen. Wenn mehrere Roboter zusammenarbeiten, geschieht dies meist unter zentraler Kontrolle oder vorher exakt definierten Abläufen. Ein Roboterschwarm hingegen besteht aus Dutzenden, Hunderten oder perspektivisch sogar Tausenden von Geräten, die jeweils relativ simpel und kostengünstig gebaut sind. Jeder Einzelroboter verfügt nur über begrenzte Sensorik und Rechenleistung und kennt meist nur den Zustand seiner unmittelbaren Umgebung. Dennoch kann das gesamte Schwarm-System durch geeignete Regeln komplexe Probleme lösen. Man spricht hier vom emergenten Verhalten: Aus dem Zusammenspiel der einfachen Einzelaktionen ergibt sich ein höheres Muster oder eine Gesamtleistung, die so nicht direkt in jeden Roboter „einprogrammiert“ ist, sondern spontan entsteht.
Biologische Vorbilder: Die Natur liefert zahlreiche Vorlagen für Schwarmrobotik. Besonders oft genannt werden Ameisen und Termiten, die ohne zentrale Führung gemeinsam Nester bauen, Brut pflegen und Wege zu Futterquellen organisieren – alles durch lokale Interaktion und sogenannte Stigmergie (indirekte Kommunikation etwa via Duftspuren). Bienen dienen ebenso als Vorbild: Ein Bienenvolk kann durch Schwänzeltanz und andere Signale gemeinsam Entscheidungen treffen, z.B. wo ein neuer Stock gebaut werden soll, und Arbeit aufteilen (Sammlerinnen, Wächterbienen etc.). Fischschwärme und Vogelschwärme zeigen eindrucksvoll, wie durch drei einfache Regeln – Abstand halten, sich an Nachbarn ausrichten, zum Gruppenmittelpunkt streben – ein synchronisiertes Schwarmverhalten entsteht (das wurde schon 1987 im „Boids“-Modell von Craig Reynolds simuliert). Auch Termiten sind faszinierende Baumeister: Sie stapeln Erde und Speichel zu meterhohen Hügeln, gesteuert durch lokale Regeln und Pheromone. All diese Beispiele eint: Kein Individuum hat den Gesamtplan, doch kollektiv entstehen geordnete Strukturen und sinnvolles Verhalten.
Die Schwarmrobotik greift solche Prinzipien auf. So versuchen Roboterschwärme beispielsweise, das Suchverhalten von Ameisen nachzuahmen, indem sie Gelände erkunden und Fundstellen (etwa eine Zielposition) durch digitale „Duftspuren“ markieren, die andere Roboter anlocken. Oder man imitiert den Bienen-Schwänzeltanz in Kommunikationssignalen zwischen Robotern, um gemeinsam einen Zielbereich auszuwählen. Durch diese biologisch inspirierten Algorithmen sollen Roboterschwärme adaptiv und robust wie natürliche Schwärme agieren.
Schwarmroboter Kilobot in aktion
Vorteile der Schwarmrobotik gegenüber Einzelrobotern und zentralen Systemen
Warum aber sollte man viele kleine Roboter einsetzen, anstatt einen großen, leistungsfähigen? Die Vorteile von Schwarmrobotik liegen in mehreren Aspekten begründet:
Robustheit und Fehlertoleranz: Ein Schwarm ist fehlertolerant. Fällt ein einzelner Roboter aus, geht die Aufgabe trotzdem weiter. Die restlichen Schwarmmitglieder können den Ausfall kompensieren. Es gibt keinen Single Point of Failure – im Unterschied zu einem einzelnen Roboter, bei dem ein Defekt die gesamte Mission gefährden könnte. Ähnlich wie ein Ameisenstaat verkraftet, dass täglich einige Arbeiterinnen sterben, bleibt ein Roboterschwarm als Ganzes funktionsfähig, selbst wenn Verluste auftreten. Dies macht Schwärme sehr robust gegenüber Störungen, Schäden oder widrigen Umweltbedingungen.
Skalierbarkeit: Schwarmrobotik-Systeme lassen sich leicht skalieren. Benötigt man für eine Aufgabe mehr Leistung oder sollen größere Gebiete abgedeckt werden, erhöht man einfach die Anzahl der Roboter. Da es keine zentrale Kontrolle gibt, muss kein „Master“-Computer leistungsfähiger sein – die Intelligenz entsteht durch lokale Interaktion, und mehr Roboter bedeuten meistens auch mehr Gesamtleistung oder Reichweite. Umgekehrt kann ein Schwarm auch mit geringerer Individuenzahl arbeiten, wenn nur ein kleiner Auftrag ansteht. Diese Skalierbarkeit bietet viel Flexibilität. In der Natur sieht man Ähnliches: Je größer eine Ameisenkolonie, desto effizienter kann sie z.B. große Nahrungsquellen ausbeuten oder komplexe Nester bauen.
Flexibilität und Anpassungsfähigkeit: Viele Schwärme können sich dynamisch an veränderte Bedingungen anpassen. Da die einzelnen Roboter dezentral reagieren, können sie etwa bei einem unerwarteten Hindernis ihren Kurs lokal ändern, ohne auf Befehle einer Zentrale zu warten. Das Gesamtsystem organisiert sich neu, um das Hindernis herum. Auch können Roboterschwärme oft verschiedene Aufgaben erfüllen, indem man einfach die Verhaltensregeln anpasst – es ist nicht nötig, jeden Roboter physisch umzubauen. Ein und derselbe Schwarm aus z.B. Drohnen könnte einmal zur Kartierung eines Geländes eingesetzt werden, ein andermal zur Suche nach bestimmten Objekten, je nachdem, welche Regelsets man ihnen gibt. Diese Vielseitigkeit ist ein Vorteil gegenüber hochspezialisierten Einzelrobotern.
Parallelisierung und Geschwindigkeit: Bei bestimmten Aufgaben kann ein Schwarm durch Aufgabenteilung erheblich schneller sein als ein Einzelgerät. Beispielsweise könnte eine Fläche von zehn Hektar von einem einzelnen Roboter nur langsam abgefahren werden – zehn Roboter im Schwarm können parallel arbeiten und die Fläche in einem Bruchteil der Zeit abdecken. Schwärme können große Aufgaben in Teilaufgaben zerlegen: Jeder Roboter übernimmt einen Teil und gleichzeitig wird am Gesamtproblem gearbeitet. So lassen sich z.B. Inspektionsaufgaben, Rechenaufgaben (in digitalen Schwärmen) oder Transportaufgaben parallelisieren.
Kosteneffizienz durch einfache Einheiten: Anstatt einen extrem komplexen und teuren Roboter zu entwickeln, setzt die Schwarmrobotik oft auf viele einfache und günstige Roboter. Die einzelnen Schwarmroboter sind meist relativ billig in der Herstellung, da sie nur grundlegende Funktionen und Hardware besitzen. Das bedeutet auch: Wenn mal einige verloren gehen oder kaputtgehen, ist das finanziell weniger dramatisch. In gefährlichen Umgebungen (etwa radioaktiv verseuchte Zonen) kann man es sich leisten, dass ein Teil der Roboter „geopfert“ wird, solange der Schwarm insgesamt genug Mitglieder behält. Insgesamt können Schwarmroboter damit eine ökonomisch attraktive Lösung sein, gerade für riskante Einsätze, bei denen Ausfälle einkalkuliert werden.
Keine aufwändige zentrale Steuerung: Bei dezentralen Schwärmen entfällt die Notwendigkeit einer leistungsfähigen zentralen Recheneinheit oder dauerhaften Kommunikationsverbindung zu einer Leitstelle. Das System ist autonom vor Ort. Dadurch reduziert sich die Komplexität der Infrastruktur. Natürlich ist die Kehrseite, dass die Intelligenz im Schwarm verteilt realisiert werden muss – was algorithmisch anspruchsvoll ist. Doch falls dies gelingt, profitiert man davon, dass kein zentrales System überlastet oder sabotiert werden kann. Der Schwarm organisiert sich selbst.
Zusammengefasst bieten Roboterschwärme also Robustheit, Anpassungsfähigkeit, Skalierbarkeit, Geschwindigkeit und oft geringere Kosten. Diese Eigenschaften prädestinieren Schwarmrobotik für eine Reihe von Anwendungen, gerade dort, wo flexibles und robustes Verhalten gefragt ist oder wo das Terrain unsicher und weitläufig ist. Natürlich gibt es auch Herausforderungen und Nachteile (etwa die Koordination so vieler Einzelteile – dazu später mehr), doch zunächst werfen wir einen Blick darauf, wo Schwarmrobotik heute schon zum Einsatz kommt oder in Zukunft kommen könnte.
Einsatzgebiete der Schwarmroboter – heute und in der Zukunft
Schwarmroboter haben ein enormes Potenzial in vielfältigen Anwendungsbereichen. Einige davon werden bereits erprobt, andere klingen noch wie Zukunftsmusik – aber vielleicht nicht mehr lange. Hier sind einige wichtige Einsatzgebiete, sowohl aktuelle als auch visionäre, in denen die Schwarmrobotik eine Rolle spielt:
Umweltüberwachung und Naturschutz: In der Umwelttechnik können Schwärme von Robotern eingesetzt werden, um große Gebiete zu überwachen. Stellen Sie sich z.B. einen Schwarm schwimmender Sensorroboter auf einem See oder im Ozean vor, die gemeinsam Daten zur Wasserqualität sammeln, Temperaturen messen oder Ölverschmutzungen aufspüren. Jeder einzelne Mini-Roboter treibt mit der Strömung oder bewegt sich selbstständig, und zusammen erstellen sie ein detailliertes Bild der Umweltdaten. In Wäldern könnten Hunderte kleiner Bodenroboter oder Drohnen Temperatur und Feuchtigkeitswerte überwachen, um frühzeitig Waldbrände zu erkennen. Auch zur Tierbeobachtung lassen sich Schwarmdrohnen einsetzen – etwa um Vogelschwärme oder Herden aus der Luft langfristig zu verfolgen, ohne diese zu stören. Die Schwarmrobotik ermöglicht es, flächendeckend und gleichzeitig an vielen Punkten Daten zu sammeln, was in Ökosystemen sehr hilfreich ist. Zukunftsvisionen reichen bis zu Schwärmen von Mikrorobotern, die in der Atmosphäre verteilt Umweltdaten liefern oder Schadstoffwolken analysieren.
Katastrophenschutz und Rettungseinsätze: In Katastrophengebieten kann ein Roboterschwarm lebensrettend sein. Beispiel Suche und Rettung: Nach einem Erdbeben oder Gebäudeeinsturz könnten hunderte kleine Suchroboter – etwa etwa insektenähnliche Krabbelroboter oder Mini-Drohnen – in Trümmer vordringen, auf der Suche nach Verschütteten. Jeder Roboter scannt einen kleinen Bereich nach Geräuschen, Wärme oder CO₂ (Hinweise auf Menschen) und gibt die Information an den Schwarm weiter. So lässt sich ein großes Gebiet in kürzester Zeit systematisch absuchen. Ein reales Beispiel ist das EU-Projekt ICARUS, das 2012 gestartet wurde: Hier entwickelte man unbemannte Systeme (Landroboter, Drohnen, Unterwasserfahrzeuge) als Helfer für Rettungskräfte. Die Vision ist, dass Rettungsschwärme aus der Luft und am Boden koordiniert zusammenarbeiten, um Überlebende zu finden, Gefahrenstellen zu kartieren und Hilfsgüter zu liefern – und zwar schneller und sicherer, als es für menschliche Einsatzkräfte möglich wäre. Auch bei Waldbränden könnten Schwärme von Löschdrohnen eng koordiniert zusammenarbeiten, um Feuer gleichzeitig von vielen Seiten zu bekämpfen. Oder denken wir an Überschwemmungen: Schwimmende Roboterschwärme könnten sich selbst zu Barrieren formieren oder Ölteppiche einkreisen. In Katastrophenszenarien ist die Robustheit der Schwarmrobotik ein großer Vorteil – selbst wenn einige Roboter ausfallen, bleibt die Mission intakt.
Medizin und Gesundheit: In der Medizin klingt Schwarmrobotik besonders futuristisch, doch hier gibt es bereits faszinierende Ansätze. Nanoroboter im Blutkreislauf – winzige Partikel oder Mikroroboter, die wie ein Schwarm Bakterien oder Krebszellen jagen – werden aktiv erforscht. Zum Beispiel arbeiten Wissenschaftler an Schwärmen magnetischer Nanopartikel, die Tumorzellen aufspüren und abtöten sollen. Diese Partikel kommunizieren nicht bewusst miteinander wie größere Roboter, aber sie verhalten sich kollektiv, beeinflusst durch physikalische oder chemische Signale, ähnlich einem Schwarm. Forscherin Sabine Hauert in Bristol etwa überträgt Prinzipien der Schwarmrobotik auf die Krebstherapie, indem sie Partikel entwickelt, die kollektiv agieren, um Tumore zu finden und Wirkstoffe gezielt abzugeben. Eine andere Vision sind Schwärme von Mini-Robotern für minimalinvasive Operationen: Dutzende winzige Robotereinheiten könnten im Körper gemeinsam ein komplexes chirurgisches Procedere ausführen, z.B. Blutgerinnsel entfernen oder Gewebe reparieren, indem jeder an einer kleinen Teilaufgabe arbeitet. Auch in der Diagnostik könnten Schwarmkapseln den Magen-Darm-Trakt gleichzeitig an vielen Stellen untersuchen. Zwar sind solche Anwendungen noch im Forschungsstadium, doch erste experimentelle Demonstrationen von “Kooperation” im Mikromaßstab wurden bereits gezeigt – etwa Mikroroboter, die sich im Körper durch Schallwellen oder Magnetfelder gemeinsam navigieren lassen. In der Krankenhauslogistik wiederum könnten etwas größere Schwarmroboter gemeinsam Material und Proben transportieren, sich selbstorganisiert Wege durch ein Gebäude suchen und Engpässe vermeiden.
Landwirtschaft und Agrartechnik: Die Landwirtschaft könnte in Zukunft massiv von Roboterschwärmen profitieren. Unter dem Schlagwort „Precision Farming“ denkt man heute schon an den Einsatz von Robotern auf dem Acker – warum nicht gleich im Schwarm? Anstatt eines riesigen, schweren Traktors, der das Feld bestellt, könnten viele kleine Feldroboter – quasi “Roboterameisen” – gemeinsam säen, jäten oder ernten. So ein Schwarm könnte z.B. Unkraut umweltfreundlich mechanisch entfernen: Jeder kleine Roboter erkennt Unkrautpflänzchen mittels Sensoren und entfernt sie gezielt, und alle Roboter teilen sich die Fläche auf. Ein deutscher Forschungsansatz namens Uckerbots untersucht etwa, wie ein Schwarm von bis zu fünf Feldrobotern im ökologischen Zuckerrübenanbau Unkraut bekämpfen kann. Auch Schwarmdrohnen über Feldern sind denkbar: Sie könnten großflächig Schädlingsbefall oder Trockenstress erkennen und dann punktgenau Pestizide oder Wasser ausbringen, anstatt das ganze Feld zu besprühen. In Obstplantagen könnten Drohnenschwärme bei der Bestäubung helfen, falls es zu wenige Bienen gibt – es gab bereits Experimente mit Robo-Bienen (dazu später mehr). Durch die Flexibilität der Schwärme kann die Landwirtschaft viel zielgenauer und effizienter werden: Der Schwarm verteilt sich genau dort, wo Arbeit anfällt, und passt sich unterschiedlichen Feldformen und -größen an. Zudem können kleine Roboter bodenschonender arbeiten, da sie leichter sind als große Maschinen und den Boden weniger verdichten.
Industrie, Logistik und Fertigung: Auch in Fabriken und Lagerhäusern zieht das Schwarmdenken ein. In modernen Warenlagern (z.B. bei Amazon) sieht man bereits Schwärme von Transportrobotern, die selbstständig Regale mit Waren durch die Hallen navigieren. Diese Roboter koordinieren sich in gewissem Sinne dezentral – sie weichen einander aus und planen Routen, ohne dass ein Mensch jedes Fahrzeug steuert. So können Hunderte von Robotern gleichzeitig arbeiten und Pakete sortieren. In der Fertigung gibt es Visionen von Schwarm-3D-Druck: Anstelle eines einzigen großen 3D-Druckers könnten viele kleine robotische Einheiten gemeinsam ein großes Objekt aufbauen, indem jede einen Teil des Materials additiv aufträgt. Damit ließen sich theoretisch Gebäude oder große Strukturen „drucken“, ohne von der Größe eines einzelnen Druckers limitiert zu sein. Erste Prototypen solcher Fertigungsschwärme wurden bereits vorgestellt. Auch für Montagearbeiten gibt es Ideen: Schwärme von kleinen Montagerobotern könnten auf einer Produktionslinie flexibel einspringen, sich gruppieren um ein Bauteil gemeinsam zu bewegen oder Schrauben simultan anziehen. In der Logistik auf dem Werksgelände könnten robotische Schwärme Transportaufgaben erledigen – immer den optimalen Weg finden, Staus umfahren und sich gegenseitig aushelfen, falls ein Roboter ausfällt. Die Industrie 4.0 setzt auf Selbstorganisation, und Schwarmrobotik liefert dafür ein passendes Paradigma.
Weltraumforschung und Raumfahrt: Selbst im All denkt man in Schwärmen. Künftige Mars- oder Mondmissionen könnten anstatt eines teuren großen Rovers lieber einen Schwarm kleiner Rover mitnehmen. Diese könnten sich auf der Planetenoberfläche ausbreiten und in Kooperation ein größeres Gebiet erforschen als ein einzelnes Fahrzeug es könnte. Wenn ein Rover steckenbleibt oder kaputtgeht, machen die anderen weiter – das erhöht die Erfolgschancen. Die NASA hat etwa Konzepte für „Marsbee“-Schwärme (kleine fliegende Sonden auf dem Mars, die z.B. in Höhlen fliegen) oder Schwärme von Mini-Rovern namens „Swarmies“ diskutiert. Auch für die Asteroidenforschung gab es das Projekt ANTS (Autonomous Nano-Technology Swarm), wo ein Schwarm von Kleinstraumsonden im Asteroidengürtel verteilt arbeiten könnte. In der Erdumlaufbahn könnten Schwärme von Kleinsatelliten koordiniert als ein verteiltes Teleskop dienen oder gemeinsam große Strukturen wie Antennen aufspannen. Die europäische Weltraumagentur ESA testete z.B. schon die koordinierte Steuerung von Kleinsatelliten in Formation. Für den Aufbau von Mondbasen könnte ein Schwarm autonomer Baufahrzeuge aus dem 3D-Drucker Mondstaub zu Gebäuden verarbeiten, während ein anderer Schwarm parallel Erkundung betreibt. Die Raumfahrt erhofft sich von Schwärmen höhere Effizienz, Ausfallsicherheit und die Fähigkeit, an mehreren Orten zugleich Messungen vorzunehmen – etwas, das Einzelgeräten schwerfällt.
Neben diesen Bereichen gäbe es noch viele weitere zu nennen – von der Unterwasserforschung (Schwärme von autonomen Tauchrobotern erkunden im Verbund die Tiefsee) bis zur Unterhaltung (Koordinierte Drohnenschwärme, die am Nachthimmel beeindruckende Lichtshows fliegen, haben wir in den letzten Jahren bei Events und Olympischen Spielen schon erleben dürfen). Die Anwendungsfelder der Schwarmrobotik reichen also quer durch alle Domänen. Überall dort, wo verteilte, flexible und robuste Technik gefragt ist, könnten Roboterschwärme künftig zur Lösung beitragen.

Geschichte der Schwarmroboter – wichtige Personen, Labore und Durchbrüche
Die Wurzeln der Schwarmrobotik liegen in den interdisziplinären Ideen der Schwarmintelligenz und der verteilten Systeme aus den 1980er und 1990er Jahren. Als einer der gedanklichen Urväter gilt der Informatiker Gerardo Beni, der 1989 gemeinsam mit Jing Wang den Begriff „Swarm Intelligence“ (Schwarmintelligenz) prägte. Damals ging es um sogenannte cellular robotic systems, also Ansätze, viele einfache „Zell“-Roboter zu koordinieren. In den 1990ern begannen erste Experimente mit Multi-Roboter-Systemen, inspiriert von Insekten. Ein Pionier der frühen Schwarmrobotik ist z.B. James McLurkin, der bereits in den späten 1990ern am MIT begann, dutzende kleiner autonomer Roboter – seine „Roboterameisen“ – gemeinsam agieren zu lassen. McLurkin entwickelte Schwarm-Algorithmen, mit denen 100 Mini-Roboter Aufgaben wie das Clustern, Suchen und Formieren erledigen konnten. 2003 gewann er den Lemelson-MIT-Preis für seine Arbeit an „robotic ants“, die kleinsten autonomen Roboter der Welt zu jener Zeit. Damit bewies er: die Idee, viele kleine Bots zu orchestrieren, war technisch machbar.
Richtig Schub bekam die Schwarmrobotik in den 2000er-Jahren durch mehrere Forschungsprojekte und neue Labors weltweit. Ein Meilenstein war das europäische Projekt SWARM-BOTS (2001–2005) unter Leitung des italienischen Informatikers Marco Dorigo. Dorigo, bekannt als Mitentwickler des Ameisenalgorithmus in der KI, gilt als einer der Gründungsväter der Schwarmrobotik. Im Projekt SWARM-BOTS wurden etwa 20 kleine mobile Roboter namens S-Bots entwickelt, die sich sogar physisch zu größeren Einheiten zusammenschließen konnten. Diese Schwarmroboter zeigten erstmals kollektives Verhalten wie gemeinsames Transportieren von Objekten, Gelände überwinden durch Verkoppeln (mehrere S-Bots hängten sich zu einer Kette zusammen, um einen Graben zu überqueren) und selbstständiges Bereichsabsuchen. Der Erfolg von SWARM-BOTS führte zu einem Nachfolgeprojekt Swarmanoid (2006–2010), das noch ambitionierter war: Hier arbeiteten gleich drei Robotertypen zusammen – fliegende „Eye-Bots“, fahrende „Foot-Bots“ und kletternde „Hand-Bots“. Gemeinsam konnten diese heterogenen Schwärme z.B. Objekte in Regalen finden (Eye-Bots lokalisierten aus der Luft, Foot-Bots transportierten am Boden, Hand-Bots kletterten hoch und griffen). Solche Durchbrüche zeigten, dass Schwarmrobotik nicht nur ein theoretisches Konzept ist, sondern in realen Robotern umgesetzt werden kann.
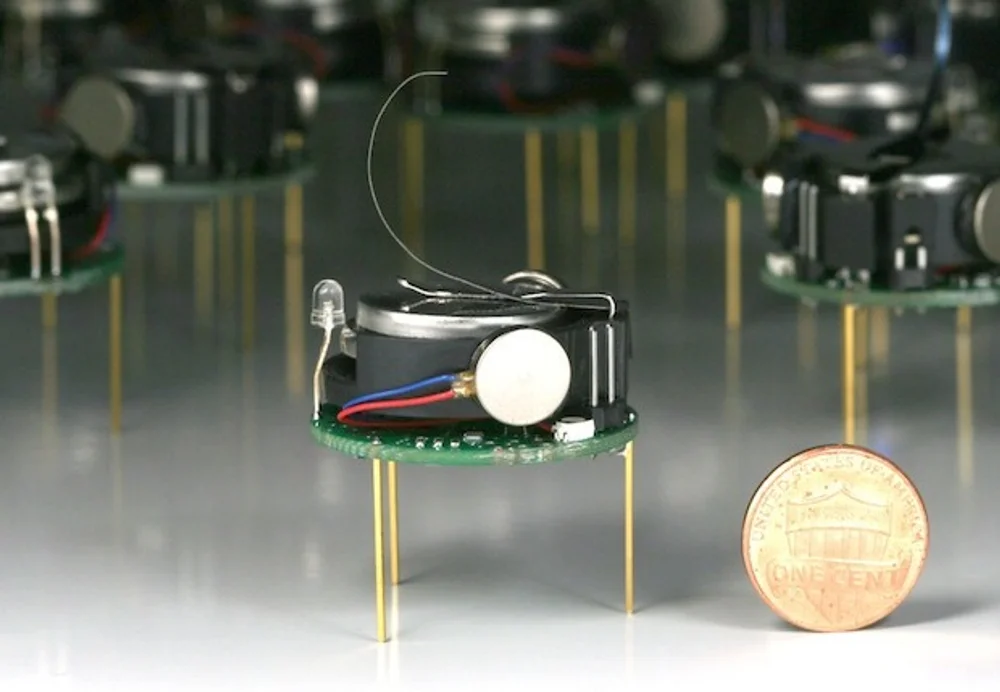
In den USA trieb u.a. Harvard University die Schwarmrobotik maßgeblich voran. Radhika Nagpal und ihr Team entwickelten 2012 die Kilobots, eine Plattform von sehr einfachen, günstigen Robotern, die speziell für Schwarmexperimente konzipiert wurden. Ein Kilobot ist nur etwa münzgroß – im Grunde eine kleine runde Leiterplatte auf drei winzigen Stelzen als Beinen. Die Fortbewegung erfolgt mittels Vibration dieser Beinchen, so dass der Roboter über glatte Flächen rutschen kann. Jeder Kilobot hat einen Infrarot-Sender/Empfänger, um mit Nachbarn im Umkreis von einigen Zentimetern Daten auszutauschen, sowie eine LED-Leuchte, um Zustände anzuzeigen. Das einzelne Gerät ist technisch simpel und kostet nur wenige Dollar – aber in der Masse entfaltet sich die Magie. 2014 präsentierte das Harvard-Team einen Schwarm von 1024 Kilobots, die sie so programmiert hatten, dass der Schwarm gemeinsam vordefinierte Formen bilden konnte – etwa ein Stern oder das Harvard-Logo. Dieser Versuch gilt als einer der ersten Nachweise, dass man tatsächlich über tausend Roboter auf einmal koordinieren kann. Die Kilobots waren damit bis dahin der größte Roboterschwarm der Welt. Auch spontane Selbstorganisation wurde mit ihnen erprobt: So simulierte ein Forscherteam um den Biologen James Sharpe 2018 mit 300 Kilobots den Prozess der Morphogenese (Musterbildung in der Embryonalentwicklung). Die Roboter reagierten auf virtuelle chemische Gradientensignale und formten aus dem Nichts streifenartige Muster – ähnlich den Streifen auf einem Zebrafell. Sogar eine Art Selbstheilung des Roboterschwarms wurde demonstriert: Trennte man die Roboteransammlung in zwei Gruppen, fanden diese wieder zueinander und verschmolzen erneut zu einem Ganzen, analog zu regenerativem Gewebe. Solche biologisch inspirierten Demonstrationen verdeutlichten die Prinzipien der Schwarmrobotik und faszinierten die Fachwelt.
Auch anderswo entstanden wichtige Labore: Das Bristol Robotics Laboratory in England (geleitet von Sabine Hauert) fokussiert sich auf Schwarmtechnologien, insbesondere die Schnittstelle zur Biologie und Medizin. Das Team von Vijay Kumar an der University of Pennsylvania machte Furore mit Schwärmen von Quadrocopter-Drohnen, die gemeinsam Formationsflüge absolvierten, Bälle warfen und sogar kooperativ Objekte trugen – diese spektakulären Videos gingen um 2012 viral und zeigten das Potenzial fliegender Schwärme. Am Georgia Institute of Technology gründete Professor Magnus Egerstedt das Robotarium, ein einzigartiges Forschungslabor, in dem jeder via Internet Programme auf echte Schwarmroboter laufen lassen kann – so will man Schwarmrobotik einem breiteren Kreis von Forschern zugänglich machen. In Deutschland beschäftigen sich Institute wie das DFKI (Deutsches Forschungszentrum für Künstliche Intelligenz) und Fraunhofer-Institute mit Schwärmen z.B. für die Raumfahrt oder Unterwasserrobotik. Unternehmen mischen ebenfalls mit: Die Firma Aquabotix etwa entwickelte den Schwarm von Unterwasserrobotern SwarmDiver (dazu später mehr). Selbst Militärforschungsprogramme in verschiedenen Ländern investieren in autonome Roboterschwärme für Aufklärung und Verteidigung.
Insgesamt ist die Geschichte der Schwarmrobotik also noch jung (so richtig erst etwa 20–25 Jahre alt), aber geprägt von rasanten Fortschritten. Wichtige Meilensteine waren: die theoretischen Konzepte der 1980er/90er, die ersten Multi-Roboter-Versuche in den 90ern (McLurkin und andere), die systematischen Forschungsprojekte in den 2000ern (Dorigos EU-Projekte, diverse Uni-Labs), und schließlich in den 2010ern die Vorführung immer größerer Schwärme und neuer Fähigkeiten (Kilobot-Formationen, Drohnenschwärme, heterogene Schwärme). Dieses Fundament bereitet den Weg, Schwarmrobotik aus dem Labor in praktische Anwendungen zu überführen. Doch damit das gelingt, müssen sowohl technische Grundlagen als auch schlaue Algorithmen vorhanden sein – darauf wollen wir als Nächstes eingehen.
Technische Grundlagen: Wie Schwarmroboter gebaut sind (Sensoren, Kommunikation, Antrieb, Energie)
Ein Roboterschwarm ist nur so gut wie die Summe seiner Teile – sprich: die einzelnen Roboter. Daher lohnt ein Blick auf die technischen Komponenten typischer Schwarmroboter. Obwohl es je nach Einsatzbereich ganz unterschiedliche Bauformen gibt (vom winzigen Nanobot bis zur autonomen Drohne), teilen viele Schwarmroboter einige gemeinsame Merkmale:
Sensorik: Jeder Schwarmroboter ist mit gewissen Sensoren ausgestattet, um seine Umgebung und die Nachbarn wahrzunehmen. Typisch sind etwa Abstandssensoren (Infrarot oder Ultraschall), mit denen der Roboter Hindernisse oder andere Roboter in unmittelbarer Nähe erkennen kann. So können Zusammenstöße vermieden und dichte Formationen gebildet werden. Kameras kommen bei sehr kleinen Schwarmrobotern selten zum Einsatz (zu teuer und datenintensiv), aber bei größeren Drohnen zum Beispiel schon – etwa zur Objekterkennung. Manche Schwarmbots besitzen Lichtsensoren, um Lichtquellen anzusteuern oder Helligkeitsunterschiede wahrzunehmen (inspiriert von Motten oder Bienen). Für Aufgaben wie Such- und Rettung können Sensoren für Geräusche, Temperatur, Gas (z.B. CO₂) oder Metall-Detektion an Bord sein. In einem landwirtschaftlichen Schwarmroboter finden sich eventuell Bodensensoren, um Feuchtigkeit oder pH-Wert zu messen. Im Grunde statten Ingenieure die Roboter mit genau den Sensoren aus, die für die kollektive Aufgabe nötig sind – wichtig ist dabei, dass die Daten meist lokal verarbeitet werden (jeder Roboter zieht Schlüsse aus seinen Sensoren für sich, ohne Rohdaten an eine Zentrale zu schicken). In neueren Entwicklungen setzt man auch auf eingebaute Karten oder GPS bei größeren Robotern, wenn eine absolute Positionierung hilfreich ist – aber ein reiner Schwarmalgorithmus kommt oft ohne GPS aus und nutzt relative Positionsinformationen (wer sind meine Nachbarn, wie weit weg sind sie?). Speziell in Schwarmdrohnen werden Lagesensoren (Gyroskope, Beschleunigungsmesser) gebraucht, um stabil zu fliegen, und ggf. Höhenmesser.
Kommunikation: Die Fähigkeit der Roboter, miteinander zu kommunizieren, ist das Herz der Schwarmkoordination. Unterschiedliche Plattformen nutzen hier verschiedene Techniken. Kleine Boden-Schwarmroboter (wie die Kilobots) setzen auf Infrarot-Kommunikation auf kurze Distanz: Sie senden LED-Lichtblitze oder IR-Signale, die von Nachbarn in Reichweite detektiert werden. Diese Art der Kommunikation ist auf wenige Zentimeter bis vielleicht einen Meter beschränkt, was aber okay ist, denn es fördert die rein lokale Interaktion. Größere Roboter und Drohnen nutzen häufig Funkkommunikation – z.B. per Bluetooth, WLAN oder spezielle Ad-hoc-Funknetzwerke. Hierbei können Roboter Datenpakete austauschen, Positionskoordinaten übermitteln oder Warnungen schicken. Eine Herausforderung ist, dass das Funkband limitiert ist und hunderte Roboter theoretisch das Netz überlasten könnten; daher werden oft minimalistische Protokolle verwendet oder die Kommunikation wird auf nahe Nachbarn beschränkt (damit nicht jeder mit jedem redet, sondern nur im lokalen Umkreis – man spricht von lokaler Konnektivität). Unter Wasser können Funk und Licht nicht gut genutzt werden, daher verwenden Unterwasser-Schwärme wie SwarmDiver Akustische Kommunikation (Schallwellen), ähnlich wie Delfine oder Unterwasser-Modems. Das geht zwar langsamer, aber reicht um Koordinationssignale zu übertragen. In einigen experimentellen Schwärmen gibt es auch indirekte Kommunikation: Roboter verändern ihre Umgebung, hinterlassen z.B. virtuelle „Markierungen“ auf dem Boden, die andere spüren können (eine digitale Analogie zu Pheromonspuren). Insgesamt gilt: Schwarmroboter kommunizieren meist nur mit Nachbarn (Ad-hoc-Netzwerke, Mesh-Strukturen) und es gibt typischerweise kein zentrales Funkkommando von einer Basisstation – wobei hybride Ansätze existieren, etwa Drohnenschwärme, die weiterhin mit einem Operator Funkkontakt halten, aber intern selbst organisiert fliegen.
Fortbewegung und Antrieb: Schwarmroboter können rollen, laufen, schwimmen oder fliegen, je nach Einsatz. Viele Forschungsschwarmbots für ebene Flächen (Laborexperimente) sind kleine Rollfahrzeuge mit Rädern oder Vibrationsmotoren. Beispielsweise haben die Kilobots keine klassischen Räder, sondern bewegen sich mittels zwei vibrierender Motoren, die den Roboter zum Gleiten bringen. Andere Plattformen wie der ePuck oder die Jasmine-Roboter (kleine europäische Schwarmbots) besitzen Räder und können in alle Richtungen fahren. Im Gelände kämen auch Bein-Roboter infrage – z.B. wurden für Forschung kleine sechsbeinige Roboter gebaut, die sich wie Insekten bewegen, um Schwarmbewegungen im schwierigen Terrain zu testen. In der Luft dominieren derzeit Quadcopter-Drohnen: Durch ihre Manövrierfähigkeit eignen sie sich gut für Schwarmformationen. Deren Antrieb sind Propeller mit Elektromotoren, gesteuert durch Bordcomputer, die auch Stabilisierung übernehmen. Bei den experimentellen RoboBee-Mikrodrohnen wiederum erfolgt der Antrieb durch schwingende Flügel (Mikro-Flugroboter mit Piezo-Aktuatoren, die wie Insektenflügel schlagen). Unterwasser-Schwarmroboter wie SwarmDiver haben kleine Propeller oder Pumpjets zum Vortrieb und können durch verstellbaren Auftrieb tauchen und auftauchen. Alle diese Antriebe brauchen Energie – das bringt uns zum nächsten Punkt.
Energieversorgung: Ein neuralgischer Punkt für alle mobilen Roboter ist die Stromversorgung. In einem Schwarm muss jedes Mitglied eigenständig mit Energie klarkommen (es sei denn, es handelt sich um stationäre verteilte Roboter ohne Bewegung). Die meisten Schwarmroboter verwenden Batterien oder Akkumulatoren als Energiequelle. Kleine Bodenroboter haben oft Lithium-Ionen-Akkus oder sogar Knopfzellen (Kilobot z.B. nutzt eine kleine Knopfzelle und kann damit mehrere Stunden operieren). Drohnen brauchen leistungsstarke Akkus, die aber nur begrenzte Flugzeiten (oft <20 Minuten für Quadrocopter) erlauben. Ein Schwarm könnte jedoch abwechselnd laden: während einige fliegen, kehren andere zur Ladestation zurück. Tatsächlich gibt es Forschungsprojekte zur induktiven Ladung: Die Roboter könnten sich an eine Ladestation anreihen oder sogar kabellos aufladen, indem sie nahe an eine Spule kommen. Ein besonderes Szenario sind Solar-betriebene Schwarmroboter: In sonnenreichen Umgebungen könnten kleine Roboter Solarzellen tragen und sich im Schwarm gegenseitig ablösen – während einige arbeiten, laden andere in der Sonne. Für Nanoroboter im Körper stellt sich die Energiefrage ganz anders: Dort experimentiert man etwa mit chemischen Treibstoffen (z.B. Reaktionen, die Blasen erzeugen und Vortrieb liefern) oder man nutzt extern angelegte Felder (Magnetfelder, Ultraschall), um die Teilchen anzutreiben, so dass sie selbst keine Batterie brauchen. Im Makro-Bereich ist das noch kein gangbarer Weg, daher bleibt Energie ein limitierender Faktor. Ein Schwarm muss klug damit haushalten – manche Schwarmalgorithmen sehen vor, dass Roboter mit niedrigem Akkustand automatisch zum “Aufladen” zurückbeordert werden und währenddessen andere Kollegen ihre Lücke füllen.
Rechenhardware: Schwarmroboter haben in der Regel eingebettete Mikrocontroller an Bord, kein besonders leistungsfähiges Gehirn. Da die Verhaltensregeln simpel sein sollen, genügen kleine Prozessoren (ähnlich wie in Smartphones oder IoT-Geräten) um die notwendigen Berechnungen – Sensorverarbeitung, Nachbarabstimmung, Bewegungssteuerung – durchzuführen. Manche Schwarmroboter koordinieren sich mithilfe von externer Infrastruktur: Im Robotarium in Georgia Tech zum Beispiel werden die Positionen der Roboter mit einer Decken-Kamera erfasst, und ein zentraler Computer hilft bei der Kollisionvermeidung – streng genommen ist das dann kein 100% autonomer Schwarm mehr, aber es erleichtert Experimente. In echten Einsätzen wird man meistens keine solche Infrastruktur haben, daher müssen die Roboter genug „an Bord“ haben, um autonom zurechtzukommen. Fortschritte in der Mikroelektronik kommen der Schwarmrobotik zugute: Immer kleinere und energieeffizientere Prozessoren, Sensor-Chips und Funkmodule ermöglichen es, auch Mini-Robotern gewisse Intelligenz einzuhauchen.
Zusammengefasst zeichnen sich die technischen Grundlagen der Schwarmroboter dadurch aus, dass Einfachheit und Robustheit über maximaler Leistungsfähigkeit einzelner Einheiten stehen. Wo möglich, wird Hardware minimalistisch gehalten. Die wirkliche Leistungsfähigkeit entfaltet sich erst im Verbund. Damit ein Schwarm aus beschränkten Einheiten aber klug handeln kann, braucht es clevere Steuerungssoftware und Algorithmen – darum kümmern wir uns im nächsten Abschnitt.
Software und Algorithmen: Koordination im Schwarm durch lokale Regeln, Selbstorganisation und KI
Die Software ist das Gehirn des Schwarms. Schließlich nutzt die beste Hardware wenig, wenn die Roboter nicht wissen, wie sie miteinander agieren sollen. Schwarmroboter werden daher mit speziellen Algorithmen programmiert, die eine Koordination ohne zentrale Instanz ermöglichen. Wie bringt man also 100 oder 1000 Roboter dazu, sinnvoll zusammenzuarbeiten? Hier einige der Methoden und Prinzipien:
Lokale Regeln statt globaler Pläne: Das Grundparadigma in Schwarmalgorithmen ist, dass jeder Roboter nur lokale Entscheidungsregeln kennt. Es wird bewusst vermieden, jedem Roboter einen globalen Plan oder exakte Wegpunkte für eine Gesamtformation vorzugeben. Stattdessen definiert man einfache Verhaltensregeln nach dem Wenn-Dann-Prinzip, basierend auf lokal verfügbaren Informationen. Ein Beispiel: „Wenn du zu wenige Nachbarn spürst, bewege dich in eine zufällige Richtung, bis du auf jemanden triffst“ (führt zum Sammeln/Aggregation von verstreuten Robotern). Oder: „Wenn dein Abstand zu einem Nachbarroboter kleiner als X ist, bewege dich etwas weg (Kollisionsvermeidung); wenn größer als Y, bewege dich etwas näher (Zusammenhalt)“ – solche Doppelregeln erzeugen zusammen ein Flockungsverhalten, analog zu Vogel- oder Fischschwärmen (Separation, Alignment, Cohesion). Craig Reynolds’ Boids-Algorithmus von 1987, der diese Prinzipien demonstrierte, ist in der Robotik umgesetzt worden, um etwa Drohnenschwärme zu koordinieren, so dass sie wie Vögel fliegen ohne zusammenzustoßen.
Selbstorganisation und Emergenz: Die Hoffnung ist, dass aus gut gewählten lokalen Regeln selbstorganisiert eine globale Zielerreichung entsteht – Emergenz genannt. Beispielsweise kann man einen Algo entwerfen, bei dem Roboter zufällig umherfahren und jedes Hindernis umrunden, dabei aber eine Art „chemisches Signal“ ablegen (digital, z.B. funken: „Ich habe etwas interessantes gefunden“). Andere ziehen zu stärkeren Signalquellen hin. Mit solchen simplen Regeln entstand in Simulationen und Roboterversuchen ein kollektives Foragieren (Suchen und Einsammeln von Objekten) ähnlich wie Ameisen Nahrung finden und heimtragen. Wichtig in solchen Algorithmen sind oft Feedback-Schleifen: Ein anfänglich zufälliges Verhalten führt zu einem kleinen Erfolg (eine Ressource gefunden), dieser wird verstärkt (mehr Roboter werden durch Signal angelockt), was wiederum den Erfolg beschleunigt – letztlich findet der ganze Schwarm die Ressource, obwohl anfangs keiner wusste, wo sie ist. Dieses Prinzip der positiven Rückkopplung kombiniert mit negativer Rückkopplung (etwa: wenn zu viele Roboter am selben Ort sind, weichen einige aus, um nicht zu kollidieren) sorgt für Balancen.
Stigmergie: Ein zentrales Konzept aus der Biologie ist die Stigmergie – indirekte Koordination durch Veränderung der Umwelt. Ameisen etwa legen Pheromonspuren, die von anderen ausgelesen werden, so „kommunizieren“ sie zeitversetzt und ortsgebunden (z.B. stark begangene Pfade werden markiert und noch stärker frequentiert). In der Robotik gibt es Versuche, ähnliches zu nutzen: Z.B. könnten Bodenroboter virtuell eine Karte mit Markierungen füllen oder physisch Chips ablegen, die andere aufsammeln. Ein experimentelles Beispiel war das „digital pheromone“ Konzept, wo Roboter ein Gelände virtuell in Zellen aufteilen und Zellen mit Infos markieren („da war ich schon“ oder „hier Objekt gefunden“), die Nachfolger dann berücksichtigen. Stigmergie erlaubt Schwärmen eine Art Gedächtnis in der Umwelt zu haben, ohne direkten Peer-to-Peer Kontakt. So koordinierte Schwärme können Aufgaben wie kollektive Konstruktion bewältigen – etwa wie Termiten, die einen Bau errichten, indem sie auf vorher abgelegten Erdklümpchen weitere ablegen. 2014 demonstrierte Radhika Nagpals Team an Harvard mit den TERMES-Robotern genau das: Kleine Baufahrzeug-Roboter hoben Klötze auf und stapelten daraus Türme und Treppen, allein getriggert durch die vorhandene Struktur (Regel: „wenn an Position X zwei Blöcke liegen, lege einen dritten darauf“) – ohne Plan, aber am Ende stand ein mehrstöckiges Gebilde.
Schwarmverhalten-Bibliothek: Forscher haben eine ganze Palette typischer Schwarmverhaltensweisen als Algorithmen entwickelt, die je nach Anwendung kombiniert werden können. Dazu gehören u.a.: Aggregation (alle Roboter kommen in einem Cluster zusammen), Dispersion (Roboter verteilen sich gleichmäßig im Raum – z.B. um Fläche abzudecken), Formation (Bildung bestimmter geometrischer Muster oder Formen), Flocking (gemeinsame Bewegung als kohäsive Gruppe, analog Vogelschwarm, bereits erwähnt), Leader-Following (manche Schwärme definieren einen temporären Anführer, dem andere folgen, z.B. der Roboter, der als erster ein Ziel findet, gibt Richtung vor), Patrouillieren (Roboter schwärmen aus und umkreisen oder überwachen ein Areal), Schwarmnavigation (gemeinsam ein Ziel erreichen, auch wenn Hindernisse da sind), kollektive Entscheidung (der Schwarm „entscheidet“ zwischen Alternativen, etwa welcher von mehreren möglichen Standorten ist am besten – analog Bienenschwarm, der neuen Nistplatz auswählt), Task Allocation (Aufgabenteilung im Schwarm, z.B. 5 Roboter kümmern sich um Bereich A, 5 um B, je nach Bedarf flexibel). Diese Verhaltensmodule werden oft mit relativ einfachen Methoden erreicht, wie Finite-State-Automaten in jedem Roboter (verschiedene Zustände wie „suchen“, „gefunden“, „folgen“ und Transitionen dazwischen aufgrund von Signalen).
Künstliche Intelligenz und Lernverfahren: Neben handdesignten Regeln zieht auch KI im weiteren Sinne in die Schwarmsteuerung ein. Zum einen nutzt man evolutionäre Algorithmen oder Reinforcement Learning, um Schwarm-Verhaltensregeln automatisch zu optimieren. Dabei wird in Simulationen getestet, welche Regelmengen gut ein gewünschtes Gesamtziel erreichen, und diese werden dann beibehalten oder weiter verbessert (eine Art Darwin-Prinzip für Algorithmen). So sind bereits einige schwarmintelligente Strategien entstanden, die ein Mensch so nicht direkt ersonnen hätte. Zum anderen müssen Schwärme in der realen Welt oft unvorhergesehene Situationen meistern – hier kann maschinelles Lernen helfen, wenn Roboter aus Erfahrungen lernen und ihr Verhalten anpassen. Allerdings ist das Lernen im Kollektiv komplex: Man erforscht sogenannte verteilte Lernalgorithmen, wo die Roboter ihre Erfahrungen austauschen und sozusagen gemeinsam ein Modell der Umwelt erlernen. Ein Beispiel: Ein Schwarm könnte mittels verteiltem Reinforcement Learning lernen, welches Areal die meisten Ressourcen liefert und sich künftig darauf fokussieren. Auch neuronale Netzwerke können im Schwarm eingesetzt werden – z.B. könnte jeder Roboter ein kleines Netz haben, das anhand von Sensorinput entscheidet, welche Aktion er tut, und dieses Netz wird in Simulation „trainiert“ für eine kollektive Aufgabe. Spannend ist auch die Kopplung von Schwärmen mit klassischen Multi-Agenten-Systemen aus der KI – hier verschwimmt die Grenze zur Software: Man kann einen Roboterschwarm auch als physisches Multi-Agenten-System sehen, das man etwa mit BlockChain-ähnlichen Mechanismen koordinieren könnte (Experimente laufen, wo Roboter Transaktionen auf einer gemeinsamen Ledger durchführen, um Konsens über Aktionen herzustellen).
Beispiel-Algorithmus: Um das greifbarer zu machen, ein vereinfachtes Beispiel: Stellen wir uns einen Schwarm Bodenroboter vor, der ein Gebiet nach Gefahrstoffen absuchen soll. Ein mögliches Algorithmus-Schema:
- Initialisierung: Alle Roboter fahren zufällig ins Gelände hinaus (Dispersion).
- Suche: Jeder Roboter schnüffelt mit seinem Sensor. Findet er nichts, ändert er gelegentlich random die Richtung (Random Walk, um Fläche zu decken).
- Entdeckung: Bemerkt ein Roboter einen Gefahrstoff (z.B. giftiges Gas), markiert er digital den Fundort (Stigmergie) und sendet ein Funksignal „Gefahr hier!“.
- Reaktion: Nachbarn, die das Signal empfangen, ändern ihre Richtung und bewegen sich Richtung Signalquelle (chemotaxis-ähnlich, wie Bakterien zu Nahrung).
- Einkreisen: Mehr Roboter kommen herbei, kommunizieren untereinander und bilden eine Art Kette um den Bereich (Formation).
- Alarmierung: Ein paar Roboter fahren zurück zum Startpunkt (oder senden gebündelt ein stärkeres Funksignal) um den „Fund“ zu melden.
Bei all dem hat keiner eine Karte des ganzen Gebiets, keiner kennt die genaue Position des Gefahrstoffs von Anfang an. Durch lokale Regel „Bei Gefahrensignal hingehen“ + „gelegentlich signal senden wenn gefunden“ + „nicht alle gehen, einige bleiben zur Verbindung“ etc., entsteht global das Verhalten: Fundstelle wird eingekreist und gemeldet. Solche Szenarien werden in der Schwarmrobotik-Forschung simuliert und getestet, um zu prüfen, welche Regelkombination robust funktioniert.
Herausforderungen in Algorithmen: Natürlich ist es extrem schwierig, lokale Regeln so abzustimmen, dass das Gesamtverhalten stabil und effizient das Ziel erreicht. Ein Problem ist etwa Rauschen und Fehlwahrnehmung: Wenn Sensoren Fehler machen oder Kommunikation stottert, kann es sein, dass sich Roboter z.B. auf Grund eines Irrtums umsonst irgendwo sammeln (falsches Signal). Schwarmalgorithmen müssen daher oft tolerant gegenüber solchen Unschärfen sein – z.B. indem Entscheidungen redundant getroffen werden (mehrere Roboter müssen denselben Fund bestätigen) oder negative Rückkopplungen eingebaut sind (wenn zu viele vergeblich gesammelt -> zerstreut euch wieder). Auch die Zeitkoordination ist tricky: Manche verteilten Algorithmen benötigen zumindest eine grobe Zeitsynchronisation oder regelmäßige Pulse, damit die Roboter nicht völlig asynchron handeln. In vielen Schwärmen werden einfache Synchronisationssignale benutzt (z.B. ein globaler Taktgeber, oder Roboter blinken in Intervallen und synchronisieren sich wie Glühwürmchen an das Blinken der Mehrheit).
Rolle von zentraler KI: Obwohl Schwarmrobotik dezentral sein will, gibt es hybride Ansätze, wo etwa ein zentraler Server sehr wohl globale Berechnungen anstellt, aber dem Schwarm nur minimale Infos einspeist. Ein Beispiel sind Drohnenschwarm-Shows: Hier berechnet ein Zentralrechner die Wegpunkte für die Dutzenden von Drohnen, um ein Bild am Himmel zu formen. Die Drohnen selbst fliegen dann autonom diese Wege ab und weichen sich gegenseitig aus. Das ist streng genommen keine emergente Selbstorganisation (weil choreografiert), aber eine praktische Lösung für ein konkretes Problem. In autonomen Schwärmen in der Praxis wird man je nach Erfordernis auch gelegentlich global eingreifen – etwa ein Mensch als Supervisor, der dem Schwarm neue Ziele setzt, während die genaue Ausführung wieder selbstorganisiert erfolgt.
Zusammenfassend basiert die Schwarmroboter-Software also auf einem Mix aus einfachen lokalen Verhaltensregeln, Mechanismen der Selbstorganisation, und zunehmend auch künstlicher Intelligenz, um komplexere Aufgaben zu bewältigen. Die Kunst besteht darin, einfache Regeln zu finden, die zuverlässig zum gewünschten komplexen Verhalten führen – was oft viel experimentieren und mathematisches Analysieren erfordert. In vielen Fällen greift man deshalb auf die bewährten Vorbilder in der Natur zurück und adaptiert Ameisen-, Bienen- oder Vogelschwarm-Algorithmen für die Roboter.
Beispiele konkreter Schwarmroboter
Nach so viel Theorie wollen wir nun einige konkrete Schwarmrobotersysteme kennenlernen, die in den letzten Jahren entwickelt wurden. Diese Beispiele – aus Universität und Industrie – zeigen die Vielfalt der Schwarmrobotik in Aktion:
- Kilobot (Harvard): Die Kilobots sind eine der bekanntesten Schwarmrobotik-Plattformen. Entwickelt von der Harvard University (Self-Organizing Systems Research Group) um 2012, handelt es sich um kleine zylinderförmige Miniroboter mit nur 3 cm Durchmesser. Ein einzelner Kilobot hat sehr limitierte Fähigkeiten: er kann sich auf drei starren Beinchen per Vibration langsam fortbewegen, via Infrarot mit anderen in ca. 10 cm Reichweite Daten austauschen und seine LED in verschiedenen Farben leuchten lassen. Doch im Schwarm von Dutzenden bis Hunderten zeigen Kilobots spannende Kollektivleistungen. Sie wurden eingesetzt, um Formationen zu bilden – etwa haben 100 Kilobots zusammen ein Smiley-Gesicht oder komplexe geometrische Muster geformt. 2014 demonstrierte Harvard dann den Schwarm von 1024 Kilobots, die sogar selbstorganisiert ein gewünschtes Bild legten. Auch Aufgaben wie kollektives Ausrichten (alle Roboter zeigen in dieselbe Richtung) oder Objektsuche wurden mit Kilobots erforscht. Die Bedeutung der Kilobots liegt vor allem darin, dass sie Forschern weltweit (die Plattform wurde offen zugänglich gemacht) eine kostengünstige Möglichkeit geben, echte Schwärme im Labor zu testen – und so Ideen aus der Theorie im Realen zu erproben. Durch ihre Einfachheit zwingen Kilobots die Algorithmen zu Robustheit: Bei ihnen klappt nichts, was nicht wirklich minimalistisch und fehlertolerant programmiert wurde.
- SwarmDiver (Aquabotix): Schwarmrobotik erobert auch die Unterwasserwelt. Ein bemerkenswertes Produkt ist der SwarmDiver der Firma Aquabotix. Dabei handelt es sich um eine Art Miniatur-U-Boot-Drohne, etwa 75 cm lang, die sowohl an der Wasseroberfläche schwimmt als auch bis ca. 50 Meter tief tauchen kann. Das Besondere: SwarmDivers treten im Rudel auf. Mehrere Dutzend dieser gelben, torpedoförmigen Roboter können von einem einzelnen Operator als Schwarm gesteuert werden. Sie koordinieren ihre Bewegungen untereinander so, dass sie wie ein einziger Organismus agieren – zum Beispiel können sie eine Formation bilden, gemeinsam abtauchen, ein Gebiet auf Patrouille absuchen und wieder auftauchen. Einsatzbereiche sind vor allem militärische und maritime Überwachung: Ein Schwarm solcher Unterwasserdrohnen könnte z.B. einen Hafen selbstständig nach Eindringlingen (wie Taucher oder Minen) abscannen, oder in der Ozeanforschung koordinierte Messungen anstellen. Technisch sind die SwarmDivers mit GPS, Funk und akustischer Kommunikation ausgestattet, damit sie sowohl an der Oberfläche als auch unter Wasser vernetzt bleiben. Mit zwei kleinen Propellern manövrieren sie sich durch das Wasser. Hier sieht man einen Schritt in Richtung Kommerzialisierung der Schwarmrobotik: Aquabotix bietet die SchwarmDiver-Technologie als Produkt an, das leicht von Nutzern bedient werden kann, um komplexe Aufgaben im Wasser zu erledigen. Der Schwarmgedanke – mehrere kleine Einheiten decken schneller und robuster ein Areal ab als ein großes Unterwasserfahrzeug – bewährt sich hier praktisch.
- RoboBees (Harvard): Während SwarmDiver im Wasser schwimmt, fliegt dieses Schwarmprojekt in der Luft – und zwar in Insektengröße. Die RoboBees der Harvard University (Wyss Institute) sind winzige fliegende Roboter, die von Bienen inspiriert sind. Jeder RoboBee wiegt nur um die 100 Milligramm und hat Flügelspannweite von wenigen Zentimetern. Sie fliegen nicht mit Propellern, sondern schlagen mit dünnen Flügeln (angetrieben durch piezoelektrische Aktoren) fast wie eine echte Insekten. Die Herausforderung ist enorm: Stabil zu fliegen und zu steuern bei dieser Größe verlangt Hochtechnologie. Anfangs waren RoboBees an eine externe Stromversorgung per Draht gebunden, da Batterien für so kleine Roboter noch nicht leicht genug waren. Inzwischen gab es Fortschritte, z.B. Modelle mit eingebauten Solarzellen, die zumindest kurz autonom fliegen können, wenn sie von starkem Licht bestrahlt werden. Die Vision hinter RoboBees ist, eines Tages Schwärme von solchen Mikrodrohnen zu haben, die Aufgaben wie Bestäubung (Ersatz für natürliche Bienen, falls diese ausfallen) oder Suche in Trümmern (eine Gruppe Miniroboter könnte in enge Ritzen fliegen und nach Verschütteten suchen) übernehmen. Noch ist das Projekt im Forschungsstadium, doch es wurden bereits eindrucksvolle Zwischenetappen erreicht: Flüge im Formationsverbund, Landemanöver an Wänden (mittels elektrostatischer Haftung, sodass ein RoboBee sich wie ein Insekt an die Wand hängen kann, um Energie zu sparen) und koordinierte Bewegungen gesteuert durch externe Motion-Capture-Systeme. RoboBees zeigen, dass selbst bei extrem kleiner Größe Schwarmrobotik machbar ist – aber sie verdeutlichen auch die technischen Hürden, insbesondere Energieversorgung und Steuerung. Sollte diese Technologie reif werden, wären Sci-Fi-Szenarien wie Schwarmintelligenz (Roman von Michael Crichton, in dem Nanoroboterwolken umherfliegen) nicht mehr fern.
- Robotarium (Georgia Tech): Nicht jedes Schwarmprojekt dreht sich um einen neuen Robotertyp – manchmal geht es darum, Schwärme zugänglicher zu machen. Das Robotarium am Georgia Institute of Technology ist ein ferngesteuertes Schwarmroboter-Labor. Es besteht aus dutzenden kleinen mobilen Robotern, die auf einer speziellen Arena-Plattform fahren. Das Besondere: Forscher aus aller Welt können übers Internet eigene Schwarmalgorithmen hochladen und am Robotarium testen, ohne selbst 100 Roboter besitzen zu müssen. Das Robotarium stellt sicher, dass die Roboter nicht kollidieren (ein Safety-Algorithmus überwacht alle), und liefert Kamera-Feedback der Experimente. So konnten bereits unzählige Algorithmen praktisch verifiziert werden – vom Formationsflug kleiner Drohnen (ja, es gibt auch fliegende Einheiten im Robotarium) bis zu komplexen Kooperationsaufgaben. Das von Professor Magnus Egerstedt initiierte Projekt senkt die Eintrittshürde zur Schwarmrobotik-Forschung. Es zeigt, dass die Community bemüht ist, Ressourcen zu teilen, ganz im Geist der Schwarmidee. Technisch nutzt Robotarium standardisierte kleine Differential-Drive-Roboter (ähnlich TurtleBots, siehe unten) und eine zentrale Steuerung zur Sicherheit, aber die Kernlogik jedes Experiments läuft dezentral auf den Robotern. Für Studenten und Tüftler weltweit ist das Robotarium eine Spielwiese, auf der sie ohne millionenschweres Budget Schwarmideen ausprobieren können.
- TurtleBots mit Schwarmsoftware: Die TurtleBot-Plattform ist in der Robotik-Lehre weit verbreitet – es handelt sich um relativ preiswerte, offene mobile Roboter (oft auf Basis eines runden Staubsauger-Roboters oder ähnlichem Fahrgestell), die mit dem Robotik-Betriebssystem ROS laufen. Einzelne TurtleBots werden oft für Programmierübungen genutzt. Doch man kann sie auch im Schwarm betreiben: Viele Universitäten haben 5–10 TurtleBots und lassen diese zusammenspielen. Dank ROS gibt es bereits fertige Schwarmsoftware-Pakete, die etwa Formation Fahren, gegenseitiges Ausweichen und Zielverfolgung erlauben. Ein Verbund von TurtleBots könnte beispielsweise zusammen einen Raum kartieren – jeder erkundet einen Teil und die Karten werden hinterher gemergt. In Wettbewerben hat man gesehen, wie mehrere TurtleBots als Team Fußball spielen oder gemeinsam Objekte transportieren (etwa einen langen Gegenstand, den ein Roboter alleine nicht heben kann, tragen zwei koordiniert). Die TurtleBots zeigen, dass Schwarmrobotik nicht nur High-End- oder Mikro-Spezialrobotern vorbehalten ist, sondern auch mit Standardgeräten und Open-Source-Software umgesetzt werden kann. Für viele Hobbyisten und Maker-Projekte weltweit sind Turtlebots oder ähnliche kleine Mobilroboter die Basis, um Schwarmverhalten im Kleinen nachzustellen – sei es 3 Roboter, die synchron tanzen, oder 10 Roboter, die wie eine Schlange hintereinander herfahren. Hier verschwimmt manchmal die Grenze zwischen echter Emergenz und zentralem Skript, aber das Prinzip des dezentralen Zusammenspiels wird dennoch demonstriert.
- Weitere Beispiele: Die oben genannten Projekte sind nur eine Auswahl. Weitere nennenswerte Schwarmrobotik-Systeme sind etwa die TERMES-Bauroboter (Harvard, für kollektives Bauen, wie erwähnt), das europäische I-SWARM Projekt, das schon Mitte der 2000er versuchte, hundert bis tausend Mikro-Roboter von nur 2mm Größe herzustellen – ein extrem ambitioniertes Vorhaben, bei dem zumindest 100 Stück erfolgreich kooperierten. Intel’s Shooting Star Drohnen sind ein kommerzielles System für Lichtshows, wo Schwärme von 100 bis über 1000 LED-bestückten Drohnen synchron gesteuert werden (allerdings weitgehend zentral choreografiert). Kiva/Amazon Robots im Lager kann man als industriellen Schwarm betrachten, auch wenn sie zentral koordiniert werden – hier agieren teils über 300 Roboter auf einer Fläche kooperativ. Im akademischen Bereich gibt es immer neue kreative Beispiele: etwa schwimmende Roboterenten, die als Schwarm Gewässer reinigen sollen, oder kleine Kletterroboter, die als Gruppe eine Wand hochkommen. Selbst im Spielzeugsektor taucht die Idee auf, z.B. Sphero-Bälle, die man synchron steuern kann. Die Beispiele demonstrieren: Schwarmrobotik ist keine Spielerei mehr, sondern hält in verschiedensten Formen Einzug – vom Labor über kommerzielle Systeme bis hin zur Kunstinstallation.
Was wurde bisher erreicht? – Experimentelle und praktische Erfolge mit Schwarmrobotern
Angesichts der vielen Projekte stellt sich die Frage: Was hat die Schwarmrobotik außerhalb von Laboraufbauten schon real bewirkt? Obwohl das Feld noch jung ist, gibt es einige bemerkenswerte experimentelle und auch erste praktische Umsetzungen:
In kontrollierten Experimenten konnten Roboterschwärme bereits:
- Formationen und Muster bilden: Das Harvard-Kilobot-Experiment mit 1024 Robotern, die selbstständig ein vorgegebenes Bild formten, ist ein weithin bekanntes Beispiel. Auch Drohnenformationen in der Forschung (z.B. 20 Quadrocopter fliegen ein Kreis-Muster) wurden demonstriert.
- Kollektive Entscheidung treffen: Experimente mit Bodenrobotern haben gezeigt, dass ein Schwarm z.B. zwischen zwei Ausgängen den „besseren“ (kürzeren Weg) finden kann, analog zum Ameisenkürzester-Weg-Phänomen, indem sie digitale Pheromone simulierten. So wählte ein Roboterkollektiv in Versuchen erfolgreich den optimalen von mehreren Pfaden zu einem Ziel, ohne dass einer global den Überblick hatte.
- Kooperatives Transportieren: Im SWARM-BOTS-Projekt gelang es einer Gruppe von S-Bots, zusammen ein Objekt, das schwerer war als jeder Einzelner, zu verschieben. Auch neuere Arbeiten mit Mini-Robotern zeigen 3-4 Roboter, die synchron ein größeres Teil tragen oder schieben – ein anschauliches Ergebnis von Teamwork.
- Bauaufgaben lösen: Die TERMES-Roboter errichteten in Harvard mehrere vorgegebene Strukturen aus Bauklötzen ganz ohne zentrale Kontrolle, was bewies, dass selbst komplexere Abläufe wie Bauen schwarmbasiert möglich sind. Ebenso gab es Versuche, wo Drohnen gemeinsam Seilbrücken spannten oder Strukturen knüpften.
- Gelände erkunden und Landkarte erstellen: Schwärme von 10-20 Robotern wurden in unbekannte Räume geschickt und haben mittels Schwarm-SLAM (Simultaneous Localization and Mapping) zusammen Karten erstellt. Jede Einheit scannte einen Teil, und sie teilten untereinander Landmarken mit. So bekam man schneller eine komplette Karte als mit einem Einzelroboter.
- Schwarmdynamik in echt: Die Flugdemos von Vijay Kumars Lab zeigten, dass 20 Drohnen in enger Halle autonom fliegen konnten, durch Reifen flogen und Formationen hielten – ein Durchbruch, der live bewies, dass die Theorie auch bei hohen Geschwindigkeiten und knappen Abständen funktioniert. Intel hat bei Shows sogar mal 1500 Drohnen gleichzeitig im Himmel koordiniert (allerdings mit präziser Vorplanung), was einen Weltrekord darstellte und die Machbarkeit großer Schwärme in der Praxis untermauerte.
Auf praktischer Seite außerhalb des Labors sieht man erste Anfänge:
- Unterhaltung und Kunst: Wie erwähnt, Drohnen-Lichtshows sind ein kommerzieller Hit geworden – vom Superbowl bis zu Freizeitparks. Zwar sind diese nicht autonom im Sinne von improvisierter Intelligenz, aber sie zeigen verlässlich, dass viele Roboter synchron agieren können in realer Umgebung. Hier hat die Schwarmtechnik also bereits einen festen Fuß in der Tür.
- Logistik: In E-Commerce-Lagern arbeiten tausende Transport-Roboter (z.B. Kiva/Amazon) täglich, die zwar zentral koordiniert werden, aber dennoch Konzepte der Schwarmoptimierung nutzen (keine festgelegten Routen, sondern jeder reagiert auf Verkehr und Aufträge). Das hat die Effizienz in Warenlagern enorm gesteigert und menschliche Laufwege minimiert.
- Militärtests: Die US Air Force hat Tests mit sog. Perdix-Drohnen durchgeführt – das sind kleine Fluggeräte, die von einer Rakete ausgestoßen werden und dann als Schwarm ein Gebiet überwachen. 2016 wurden z.B. 103 solcher Drohnen zeitgleich erfolgreich in Formation geflogen, mit verteiltem Rollenwechsel. Auch die US Navy testete autonome Schwarmboote für Patrouillen. Und Berichten zufolge wurde der russische Luftwaffenstützpunkt Hmeimim in Syrien 2018 von einem Schwarm aus 13 improvisierten Drohnen angegriffen, was als erstes Beispiel eines Schwarmangriffs gilt (wenn auch eher primitiv gesteuert). Diese realen Vorfälle unterstreichen, dass Schwärme nicht nur im Labor existieren.
- Landwirtschaftliche Pilotprojekte: Es gibt Feldversuche, z.B. in Australien hat das Startup SwarmFarm kleine Roboter als Herde über Farmen geschickt, um Unkraut zu sprühen. In Europa testet man in Projekten wie den Uckerbots (Brandenburg, DE) Mehrrobotersysteme für Bio-Landbau. Auch Schwarmdrohnen für Weinberge (zum Ausbringen von Nützlingen gegen Schädlinge) wurden experimentell eingesetzt. Die Resultate zeigen oft: mehrere kleinere Maschinen können ebenso gut oder besser arbeiten wie ein großer Traktor, mit weniger Bodenbelastung und mehr Ausfallsicherheit.
- Unterwasser-Erkundung: Systeme wie SwarmDiver wurden z.B. bei Übungen in Küstengewässern eingesetzt, um gemeinsam Gebietsdaten zu sammeln. Hier steht der praktische Routineeinsatz noch bevor, aber Testläufe verliefen erfolgreich – eine Gruppe SwarmDiver hat autonom eine Suchformation abgefahren und dabei z.B. Objekte auf dem Meeresboden detektiert.
- Medizinische Forschung: Im Laborstadium, aber mit realen Ergebnissen: Schwärme von Nanopartikeln haben in Tierversuchen gezielt Tumorzellen erreicht, indem sie so designed wurden, dass sie sich in der Blutbahn sammeln wo ein bestimmter Stimulus ist (z.B. ein Temperaturunterschied). Ebenfalls wurden mikroskopisch kleine magnetische Partikel erfolgreich zu Schwärmen gebündelt: Forscher steuerten viele dieser Teilchen so, dass sie sich zu einer „Perlenkette“ zusammenordneten und gemeinsam etwas transportieren konnten – dies könnte eines Tages genutzt werden, um Medikamentenkapseln durch den Körper zu navigieren. Noch sind das keine standardmäßigen Therapien, aber die Experimente liefern Machbarkeitsnachweise.
Allerdings muss man fairerweise sagen: Echte Durchbrüche im Alltag – also Roboterschwärme, die regelmäßig wichtige Aufgaben in der normalen Welt erledigen – sind derzeit noch selten. Vieles steckt in der Erprobungsphase oder in Demonstrationen. Es ist kein Wunder: Einen Schwarm aus dem Labor in die freie Wildbahn zu bringen, konfrontiert die Entwickler mit jeder Menge zusätzlicher Schwierigkeiten (Wetter, unvorhersehbare Ereignisse, gesetzliche Regularien, Sicherheit etc.). Trotzdem wurden Fundamentsteine gelegt: Wir haben heute funktionierende Prototypen für Scharmsysteme in der Luft, zu Land, zu Wasser und sogar in Lebewesen (Nano-Schwärme). Die kommenden Jahre werden zeigen, wie diese Teilerfolge in produktive Anwendungen münden.
Zukunft der Schwarmrobotik – gesellschaftliche Bedeutung, Trends, ethische Fragen und technische Herausforderungen
Die Zukunft der Schwarmrobotik verspricht spannend zu werden. Viele Experten glauben, dass Schwärme von Robotern in den nächsten Jahrzehnten in verschiedenen Sektoren zum alltäglichen Bild gehören könnten – vergleichbar mit der Einführung von Industrierobotern in Fabriken in den 1970ern oder der Vernetzung von Computern zum Internet. Doch es gibt auch Hürden und Fragen. Werfen wir einen Blick auf einige Aspekte der Zukunft:
Gesellschaftliche Bedeutung und Chancen: Sollte Schwarmrobotik ihre Versprechen einlösen, könnten wir in vielen Bereichen profitieren. In der Industrie könnten Produktionsanlagen flexibler und fehlertoleranter werden, Lieferketten könnten automatisiert und doch adaptiv gesteuert werden durch Schwarmlager und -fahrzeuge. In der Landwirtschaft könnten Schwärme helfen, ökologischer zu wirtschaften (zielgenauer Pestizideinsatz, minimalinvasive Bodenbearbeitung). In Städten könnten Schwärme autonomer Fahrzeuge den Verkehr flüssiger machen, indem sie sich untereinander abstimmen statt auf starre Ampeln zu hören. In der Medizin könnte personalisierte Therapie auf Mikrorobotik basieren, wo Schwärme im Körper präzise Eingriffe machen, was invasivere Methoden ersetzt. Für Katastrophenhilfe und Umweltschutz könnten Schwärme zu stillen Helden werden – überall dort schnell im Einsatz, wo Menschen in Gefahr wären oder nicht hinkommen. Stell dir in Zukunft Hunderte von kleinen Löschrobotern vor, die einen Waldbrand aus der Luft und vom Boden aus gleichzeitig bekämpfen und so Großfeuer unter Kontrolle bringen, bevor sie eskalieren. Oder Schwarmdrohnen, die bei einer Ölkatastrophe auf dem Meer ausfliegen, um das Öl zu verbrennen oder zu binden, ehe es die Küste erreicht. Die Vorstellung ist, dass viele Probleme, die heute großflächige, koordinierte Aktionen erfordern, durch Roboterschwärme effizienter und schneller angegangen werden können. Das könnte Ressourcen sparen und Leben retten. Aus gesellschaftlicher Sicht bedeutet dies aber auch: Arbeitsprozesse verändern sich, einige Aufgaben könnten von Schwärmen übernommen werden, was neue Jobprofile (für Überwachung, Wartung, Design solcher Systeme) schafft und andere obsolet macht.
Forschungstrends: Aktuell beschäftigen sich Forscher mit einigen Schlüsselfragen, die die nächsten Durchbrüche bringen sollen. Ein großer Trend ist die Heterogenität von Schwärmen: Künftig werden Schwärme nicht nur aus identischen Robotern bestehen, sondern aus Mischungen verschiedener Typen (wie im Swarmanoid-Projekt). Das spiegelt reale Anforderungen besser wider – etwa bei einer Rettungsaktion braucht man fliegende Einheiten für Übersicht, fahrende fürs Gelände und vielleicht grabende für Trümmer; alle sollen zusammenwirken. Solche heterogenen Schwärme sind aber viel komplexer zu koordinieren, da die Roboter unterschiedliche Fähigkeiten und “Sprache” haben. Hier entwickeln Forscher Protokolle, wie sich ungleiche Roboter verständigen und Aufgaben dynamisch zuteilen (Stichwort: Task Allocation in gemischten Teams). Ein weiterer Trend ist der Einsatz von Automatischem Design: Algorithmen selbst entwerfen Schwarmverhalten – man gibt nur das gewünschte Ziel vor und lässt z.B. einen evolutionären Algorithmus geeignete Regeln finden. Erste Ergebnisse sind vielversprechend, aber das muss noch zuverlässiger werden. Hierarchische Schwärme sind auch im Kommen: Dabei hat der Schwarm eine interne Struktur, z.B. Gruppenführer (die aber wechseln können) oder Module, die jeweils eigene Schwärme bilden und wiederum mit anderen Module-Schwärmen interagieren – quasi Schwärme von Schwärmen. Dies könnte helfen, Skalierbarkeit zu verbessern (man zerlegt 1000 Roboter in 10 Teams à 100, die lokal agieren, und nur ihre Teamleiter tauschen global Infos aus). Auch das Feld der Mensch-Schwarm-Interaktion wird wichtiger: Wie kann ein Mensch effizient einen ganzen Schwarm beeinflussen oder überwachen, ohne von Informationen überflutet zu werden? Man experimentiert mit Augmented Reality Interfaces, wo ein Einsatzleiter vielleicht per Gesten einen Drohnenschwarm lenken kann, oder mit Sprachkommandos auf hoher Abstraktionsebene („erkundet Gebäude X, meldet Gefahren“ und der Schwarm bricht das selbstständig runter).
Technische Herausforderungen: Trotz aller Fortschritte bleiben einige harte Nüsse zu knacken. Kommunikation ist eine davon: Funksignale können unsicher werden, gerade wenn viele Geräte gleichzeitig funken. Skalierbare Netzwerktopologien und Frequenzmanagement für hunderte Geräte sind nötig – eventuell könnten 5G/6G-Technologien oder spezielle Schwarm-Funkprotokolle Abhilfe schaffen. Auch die Energiefrage ist ungelöst – bessere Batterien oder autonome Lademethoden sind notwendig, damit Schwärme lange durchhalten oder fernab von Infrastruktur arbeiten können (man denke an einen Rover-Schwarm auf dem Mars – dort muss jeder Solarzellen haben und selbst dann nur am Tag aktiv sein). Verlässlichkeit ist ein wichtiges Thema: In sicherheitskritischen Anwendungen (Rettung, Medizin) muss garantiert sein, dass der Schwarm nicht plötzlich versagt oder außer Kontrolle gerät. Das ist schwer, weil emergentes Verhalten per se ein Element von Unvorhersehbarkeit hat. Forscher arbeiten daher an formalen Methoden, um Schwarmverhalten zu verifizieren (eine Art mathematischer Beweis, dass gewisse unerwünschte Zustände nie eintreten). Auch Mechanismen zur Fehlererkennung im Schwarm werden erforscht – z.B. sollen Roboter feststellen können, wenn einer aus der Reihe tanzt (vielleicht gehackt oder defekt) und diesen isolieren. Die Hardware-Miniaturisierung geht weiter: Um wirklich nanorobotische Schwärme zu bauen, braucht es noch Durchbrüche in der Mikroproduktion, Biokompatibilität (für medizinische Bots) und Steuerungsverfahren (wie kontrolliert man z.B. 1000 Partikel im Blut – vielleicht mit Magnetfeldern, aber wie adressiert man einzelne?). Nicht zuletzt ist auch die Software-Komplexität eine Herausforderung: Je größer und vielfältiger der Schwarm, desto schwieriger wird es, die richtigen Algorithmen zu entwerfen. Hier kommen KI-Hilfsmittel ins Spiel, doch die sind auch nicht allmächtig.
Ethische und gesellschaftliche Fragen: Wie jede mächtige Technologie ruft auch die Schwarmrobotik Fragen hervor, die über das Technische hinausgehen. Ein großes Thema ist die militärische Anwendung. Autonome Drohnenschwärme als Waffen (sogenannte „Killer-Roboter“) sind keine Science Fiction mehr. Es gibt Diskussionen auf UN-Ebene, solche tödlichen autonomen Waffensysteme zu reglementieren oder zu verbieten. Ein Schwarm von kleinen bewaffneten Drohnen könnte theoretisch ein Gebiet autonom durchsuchen und menschliche Ziele ausschalten – eine beängstigende Vorstellung, wenn die Kontrolle unklar ist. Hier stellt sich die Ethik-Frage: Dürfen Maschinen kollektiv entscheiden, Menschenleben zu nehmen? Die Schwarmrobotik an sich ist neutral, aber ihr Einsatz kann ethisch problematisch werden. Auch abseits des Militärs gibt es Sicherheitsbedenken: Was, wenn ein Roboterschwarm außer Kontrolle gerät oder durch einen Fehler Schaden anrichtet? Die dezentrale Natur erschwert menschliches Eingreifen – es gibt keinen „Aus-Knopf“ für den gesamten Schwarm, man müsste jeden einzelnen stoppen. Daher muss intensiv über Notfallprozeduren nachgedacht werden. Ein anderes Feld ist Privatsphäre: Schwarmdrohnen könnten flächendeckende Überwachung betreiben, etwa in Städten oder Naturschutzgebieten. Wer garantiert, dass solche Schwärme nicht missbraucht werden, um Bürger auszuspionieren? Gesellschaftlich muss entschieden werden, wofür Schwärme eingesetzt werden und wo Grenzen gezogen werden. Es besteht zudem die Gefahr der Arbeitsplatz-Verdrängung: Wenn bspw. in Logistik oder Landwirtschaft viele Aufgaben durch Roboterschwärme erledigt werden, was passiert mit den menschlichen Arbeitskräften? Allerdings entstehen auch neue Aufgaben – die Roboter müssen entworfen, überwacht, gewartet werden.
Akzeptanz: Wie werden Menschen auf Roboterschwärme reagieren? Einzelne Roboter sind wir allmählich gewohnt (Staubsaugerroboter daheim, Roboterarme in Fabrik). Aber ein Kollektiv von Maschinen, das sich vielleicht scheinbar wie lebende Wesen verhält, könnte gemischte Gefühle auslösen. Manche werden fasziniert sein (etwa von einer Drohnen-Show), andere eher Unbehagen verspüren, wenn plötzlich 50 kleine Roboter in der Nachbarschaft umherflitzen. Um Schwarmrobotik gesellschaftlich erfolgreich zu machen, wird man Transparenz schaffen müssen – die Menschen wollen verstehen, was der Schwarm tut und dass er unter Kontrolle ist. Vielleicht wird man optische Signale einbauen (wie alle leuchten grün, wenn alles okay ist, rot bei Fehlfunktion) oder klare Grenzen (z.B. geofence, Schutzzonen, wo sie nicht rein dürfen).
Trotz aller Fragen sieht die Fachwelt großes Potenzial. In gewisser Weise ist Schwarmrobotik die Fortsetzung eines Trends zur Dezentralisierung und Selbstorganisation in Technik und Gesellschaft. Vom Internet, das dezentral kommuniziert, über Blockchain, die ohne zentrale Bank auskommt, bis zu Schwarmrobotern, die ohne zentralen Computer auskommen – die Idee ist, mit Netzwerken einfacher Einheiten komplexe Leistungen zu vollbringen. Wenn es gelingt, diese Prinzipien zuverlässig zu beherrschen, könnte Schwarmrobotik zu einem Schlüsselbaustein der zukünftigen Technologie werden. Man stellt sich vor, dass in ein paar Jahrzehnten Roboterkollektive im Hintergrund viele Aufgaben erledigen: Sie reparieren Straßen über Nacht (eine Armee kleiner Builder-Bots flickt jeden Schlagloch), sie pflegen Umweltanlagen (Miniroboter schwärmen durch Parks und sammeln Müll oder monitoren die Pflanzen), sie bilden spontan Rettungsteams bei Unfällen (etwa Autos, die zusammenarbeiten um eine Unfallstelle abzusichern, Verletzte zu orten und zu versorgen noch bevor der Krankenwagen eintrifft).
Die kommenden Jahre werden wohl zunächst Pilotanwendungen sehen: überschaubare Schwärme im Einsatz bei einzelnen klar umrissenen Problemen. Daraus wird man lernen, sowohl technisch als auch regulatorisch. Mit fortschreitender Miniaturisierung und KI-Integration dürften die Schwärme dann größer, autonomer und vielfältiger werden. Vielleicht werden wir eines Tages den Ausdruck „Schwarm“ nicht mehr nur mit Bienen oder Vögeln verbinden, sondern genauso selbstverständlich mit Roboterteams. Die Vorstellung, dass Intelligenz aus der Masse entstehen kann, ohne zentrale Leitung, könnte dann nicht nur ein Konzept aus Biologie und Soziologie sein, sondern gelebter technologischer Alltag – mit all seinen Vorzügen und Herausforderungen.
Fazit: Schwarmrobotik hat in kurzer Zeit den Sprung von der Idee hin zu beeindruckenden Machbarkeitsbeweisen geschafft. Noch steht sie am Anfang kommerzieller Nutzung, doch die Richtung ist gesetzt. Gerade technikbegeisterte Menschen dürfen gespannt sein: Die nächsten „wuseligen“ Innovationen könnten durchaus von Roboterameisen, -bienen und -fischen kommen, die uns vormachen, dass Teamwork nicht nur unter Lebewesen, sondern auch unter Maschinen der Schlüssel zu komplexen Aufgaben sein kann. In diesem Sinne: Die Schwärme kommen – und mit ihnen eine neue Form der Intelligenz in unserer technisierten Welt.