Schwarmroboter im Taschenformat – Die Kraft der Vielen
Kilobot, die enfesslung der vielen. Ein leises Summen erfüllt den Raum, als sich hunderte kleiner Roboter gleichzeitig in Bewegung setzen. Etwa münzgroße Maschinen krabbeln vibrierend über eine Tischplatte, scheinbar chaotisch durcheinander. Doch nach wenigen Minuten ordnen sie sich zu einem Muster: Aus der Vogelperspektive erkennt man plötzlich einen Stern, geformt aus lauter kleinen Lichtern. Was hier wie von Zauberhand geschieht, ist in Wahrheit das Ergebnis moderner Technik und ausgeklügelter Algorithmen. Die winzigen Geräte – sogenannte Kilobots – zeigen eindrucksvoll, was Schwarmrobotik heute leisten kann.
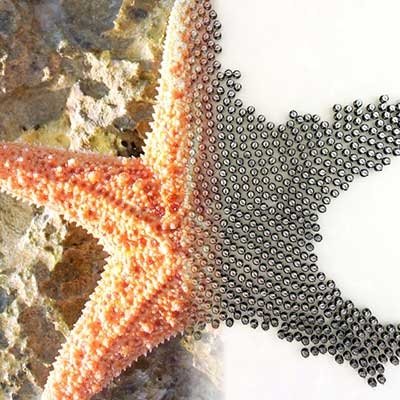
Statt auf einen einzelnen Super-Roboter zu setzen, lässt die Schwarmrobotik viele einfache Roboter gemeinsam Aufgaben lösen. Nach dem Vorbild von Ameisen, Bienen oder Fischen entsteht aus zahllosen einfachen Handlungen ein überraschend intelligentes Gesamtverhalten. Die Kilobots aus dem Labor der Harvard-Universität gehören zu den bekanntesten Exemplaren dieser Technik. In großer Zahl koordiniert, können sie Dinge vollbringen, die ein einzelner Roboter nicht schaffen würde. Aber wie funktionieren diese Mini-Roboter eigentlich, wer hat sie entwickelt – und welche Möglichkeiten eröffnen Schwärme aus Maschinen für unsere Zukunft?
Inhalt
Schwarmrobotik: Prinzipien, Ursprünge und Vorteile
In der Natur wirken große Schwärme oft verblüffend intelligent – man denke an Ameisenkolonien, die gemeinsam Nahrung finden und transportieren, oder an Vogelschwärme, die perfekte Formationen am Himmel bilden. Schwarmrobotik ist der Versuch, solche kollektiven Verhaltensweisen mit Maschinen nachzubilden. Dabei gibt es keinen zentralen „Chef“-Roboter, der allen sagt, was sie tun sollen. Stattdessen agieren viele einfache Roboter nach vergleichsweise simplen Regeln und stimmen sich nur lokal mit ihren Nachbarn ab. Aus diesen dezentralen Interaktionen entsteht ein geordnetes Gesamtverhalten, das komplexe Aufgaben bewältigen kann – ähnlich wie ein Ameisenstaat mehr ist als die Summe seiner einzelnen Ameisen.

Die Prinzipien der Schwarmrobotik wurden in den 1980er- und 1990er-Jahren in der Robotik und Künstlichen Intelligenz entwickelt, inspiriert durch das Konzept der Schwarmintelligenz aus der Biologie. Frühe Experimente setzten auf Dutzende kleiner Roboter, die gemeinsam navigierten oder Objekte verschoben. Die anfänglichen Ergebnisse zeigten bereits: Ein Schwarm kann erstaunlich robust und anpassungsfähig sein. Wenn ein einzelner Roboter ausfällt, übernimmt der Schwarm als Ganzes trotzdem die Aufgabe – ähnlich wie ein Ameisenvolk einen Verlust einzelner Arbeiterinnen verkraftet. Zudem lassen sich Schwärme leicht skalieren: Hat man einen Algorithmus für zehn Roboter entwickelt, funktioniert er im Idealfall auch mit hundert oder tausend Robotern, ohne dass man jede Einheit einzeln steuern muss.
Vorteile dieser Herangehensweise liegen auf der Hand. Schwarmroboter können große Bereiche effizient abdecken, parallel Aufgaben erledigen und auf Störungen flexibel reagieren. Es gibt keinen zentralen Ausfallpunkt – das System ist fehlertolerant. Außerdem sind die einzelnen Roboter oft günstig und schlicht gebaut. So wird es ökonomisch machbar, sehr viele von ihnen einzusetzen, anstatt wenige teure Spezialmaschinen. Kurz gesagt: Viele Hände – oder in diesem Fall viele kleine Roboterbeine – bewirken zusammen mehr als ein Einzelkämpfer. Die Schwarmrobotik eröffnet damit völlig neue Möglichkeiten, komplexe Probleme durch kollektives Verhalten zu lösen.
Die Geburt des Kilobot: Eine kühne Idee aus Harvard
Die Idee zum Kilobot entstand aus dem Bedürfnis, Schwarmroboter-Forschung endlich in großem Maßstab praktisch zu erproben. Anfang der 2010er-Jahre tüftelte die Self-Organizing Systems Research Group an der Harvard-Universität (Cambridge, USA) an Methoden, Roboter kollektiv agieren zu lassen. Geleitet wurde das Team von der Informatikprofessorin Radhika Nagpal, einer Pionierin auf dem Gebiet der Schwarmintelligenz. Zusammen mit ihren Kollegen – darunter der Postdoktorand Michael Rubenstein und der Ingenieur Christian Ahler – stellte Nagpal sich eine ambitionierte Frage: Was wäre, wenn wir nicht nur mit zehn oder zwanzig Robotern experimentieren, sondern mit hunderten oder gar tausenden gleichzeitig?
Bisher scheiterte ein solcher „Mega-Schwarm” meist an den Kosten und der Handhabung. Kommerzielle Robotereinheiten waren teuer, und Hunderte davon zu kaufen und zu betreiben war schlicht unpraktisch. Nagpals Team verfolgte daher einen anderen Ansatz: Ein Roboter musste so einfach und günstig wie möglich gebaut sein, damit man ihn in großer Stückzahl herstellen kann. So wurde der Kilobot geboren – der Name spielt augenzwinkernd auf das griechische „Chilioi” für Tausend an. Das Ziel war nichts Geringeres, als eines Tages einen Schwarm aus 1.000 Robotern zum Laufen zu bringen.
Bereits 2011 präsentierten die Harvard-Forscher erste Ergebnisse mit kleinen Gruppen von Kilobots. Damals waren es nur 25 Exemplare, die gemeinsam einfache Aufgaben wie Formationen bilden oder nach einem „Futter”-Signal suchen konnten. Doch das Konzept überzeugte: Die Roboter funktionierten autonom im Team, und die Kosten blieben sensationell niedrig. Die Bauteile für einen Kilobot kosteten weniger als 20 US-Dollar – ein Bruchteil dessen, was klassische Forschungsroboter ausmachten. 2012 gewann das Design prompt einen Preis im Rahmen eines internationalen Wettbewerbs für Bildungsroboter, der besonders preiswerte Konzepte auszeichnen sollte.
Angespornt von diesem Erfolg steigerte das Team die Stückzahl kontinuierlich. Schließlich, im Jahr 2014, war es so weit: Erstmals schwärmten 1.024 Kilobots – exakt 2^10 Einheiten, also ein „Kilo” im binären Sinne – auf dem Laborboden aus und formierten sich selbstständig zu vorgegebenen Mustern. Diese Demonstration sorgte weltweit für Aufsehen und bewies, dass Schwarmrobotik nicht nur Theorie ist. Dank einer Kooperation mit einer Schweizer Robotik-Firma wurden Kilobots zudem kommerziell verfügbar gemacht und ihre Konstruktionspläne als Open-Source veröffentlicht. Damit konnten auch andere Forschungsgruppen und sogar interessierte Laien eigene Kilobot-Schwärme aufbauen und weiter mit dieser faszinierenden Technik experimentieren.

Technik im Miniformat: Hardware und Software der Kilobots
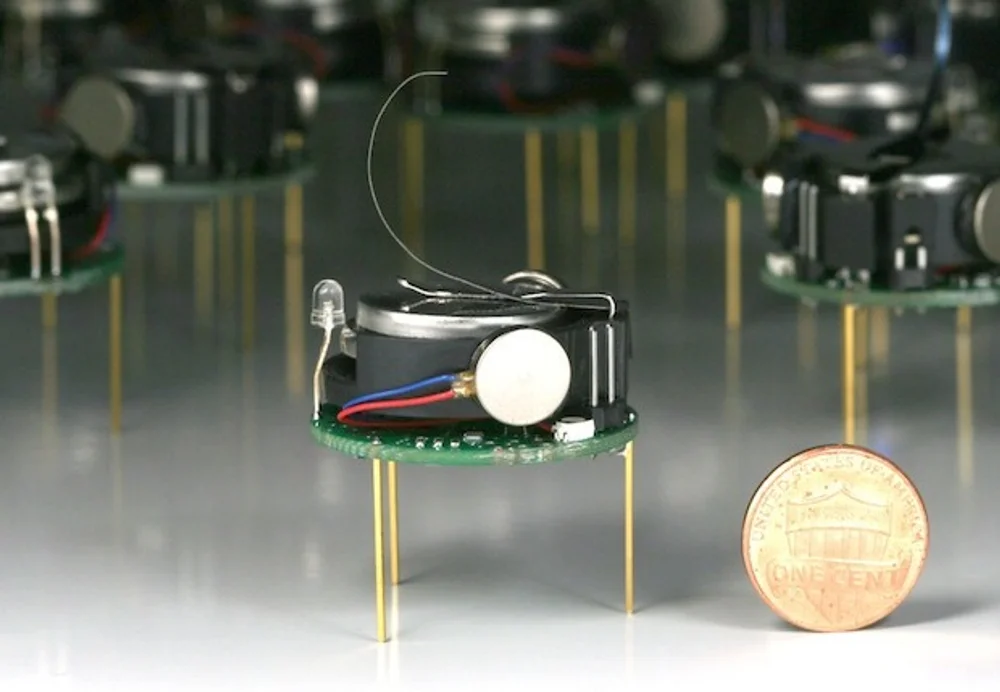
Ein einzelner Kilobot ist eine erstaunlich einfache Maschine. Der runde Roboter hat einen Durchmesser von nur etwa 3 Zentimetern – kaum größer als eine Münze – und steht auf drei dünnen, starren Beinchen von rund 2 Zentimetern Länge. Räder sucht man vergeblich: Stattdessen sorgen zwei winzige Vibrationsmotoren für den Antrieb, ähnlich denen, die in Mobiltelefonen für den Vibrationsalarm verwendet werden. Durch das abwechselnde oder gleichzeitige Vibrieren dieser Motoren kann sich der Kilobot entweder geradeaus bewegen (wenn beide Motoren aktiv sind) oder drehen (wenn nur einer aktiviert ist). Das Vorankommen ist zwar gemächlich – ungefähr 1 Zentimeter pro Sekunde – doch für die Zwecke eines Schwarms genügt es völlig. Wichtig war den Entwicklern vor allem die Einfachheit: Teure Antriebskomponenten wie Räder oder komplexe Servomotoren wurden bewusst weggelassen, um Kosten zu sparen und weniger Fehlerquellen zu haben.
Als Energiequelle dient ein kleiner wiederaufladbarer Lithium-Ionen-Akku. Damit kann ein Kilobot je nach Aktivität einige Stunden lang betrieben werden, bevor er wieder aufgeladen werden muss. Das Aufladen und Einschalten vieler Roboter gleichzeitig wäre normalerweise mühsam, doch hier zeigt sich eine Stärke des Kilobot-Systems: Alle Einheiten lassen sich kollektiv handhaben. Mit einem speziellen Infrarot-Transmitter können z.B. alle Roboter auf einmal aktiviert oder in den Schlafmodus versetzt werden, und es gibt Ladestationen, die das gleichzeitige Aufladen dutzender Kilobots erlauben. So ist es einer einzigen Person möglich, Hunderte von Minirobotern quasi auf Knopfdruck in Betrieb zu nehmen.
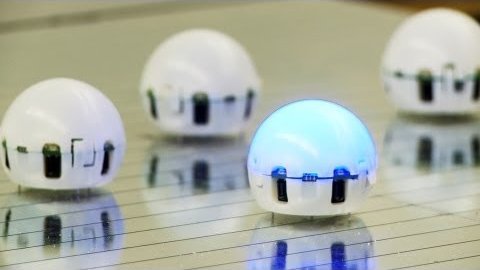
Sensorik und Kommunikation: Jeder Kilobot verfügt über minimalistische Sensoren. An der Unterseite sitzt ein Infrarot-Sender und -Empfänger, mit dem der Roboter Nachrichten an seine direkten Nachbarn schicken kann. Die Signale werden flach über den Boden ausgesendet und von der Oberfläche reflektiert, sodass benachbarte Kilobots sie detektieren. Die Reichweite liegt nur bei etwa 7 bis 10 Zentimetern – ausreichend, damit sich Roboter, die nahe beieinander stehen, „sehen” können. Über die empfangenen Infrarot-Signale kann ein Kilobot auch grob abschätzen, wie weit entfernt der Sender ungefähr ist (etwa anhand der Signalstärke). Zusätzlich besitzen die Roboter einen einfachen Lichtsensor, der Umgebungshelligkeit wahrnimmt. Dieser erlaubt z.B. Experimente, bei denen die Schwarmroboter auf Lichtquellen reagieren oder Tag-Nacht-Zyklen simulieren. Nicht zuletzt trägt jeder Kilobot eine kleine LED-Leuchte, die in verschiedenen Farben aufblinken kann – nützlich, um Zustände anzuzeigen oder für Synchronisations-Experimente (etwa wenn alle Roboter im Takt blinken sollen).
Im „Gehirn“ des Kilobot arbeitet ein günstiger Acht-Bit-Mikrocontroller (ein ATmega-Chip), wie er auch in Arduino-Bastelboards verwendet wird. Mit 8 MHz Taktfrequenz und wenigen Kilobyte Speicher ist seine Rechenleistung bescheiden – weit entfernt von jedem Smartphone. Doch er reicht aus, um die notwendigen Funktionen auszuführen. Die Software der Kilobots wurde so gestaltet, dass sie trotz der knappen Ressourcen stabile Ergebnisse liefert. Typischerweise werden die Roboter in der Sprache C programmiert. Die Entwickler haben eine Programmierschnittstelle und Beispiel-Code veröffentlicht, mit der man dem Schwarm verschiedenste Verhaltensweisen beibringen kann. Vom Grundprinzip her läuft auf jedem Kilobot dasselbe Programm: Es definiert, wie der Roboter auf bestimmte lokale Sensorinformationen reagiert (etwa „Wenn ein Nachbar-Signal empfangen wird, dann …“). Durch diese Regeln entsteht dann die koordinierte Gesamtaktion des Schwarms.
Die Koordination im Kilobot-Kollektiv erfolgt also rein durch lokale Interaktionen. Es gibt kein zentrales Steuerungsgerät, das jedem Roboter individuelle Befehle erteilt. Stattdessen werden allen Robotern vor dem Start das gleiche Programm und eine gemeinsame Aufgabe übermittelt – beispielsweise die Vorgabe, eine bestimmte Form zu bilden. Die Verteilung von Programm-Updates oder Startsignalen geschieht bequem per Infrarot-Broadcast von einem übergeordneten Sender aus, der an einem Computer hängt. Sobald die Roboter das Startsignal erhalten, sind sie auf sich gestellt: Ab dann läuft die schwarmweite Abstimmung autonom ab, ausschließlich über die Kommunikation der Roboter untereinander.



Zusammenarbeit im Schwarm: Kommunikation, Navigation und Koordination
Wie findet nun ein Schwarm aus hunderten Kilobots ohne zentralen Dirigenten zu einem geordneten Verhalten zusammen? Der Schlüssel liegt in einfachen, lokalen Regeln der Kommunikation und Navigation, die – vielfach wiederholt – zum kollektiven Erfolg führen. Jeder Kilobot kommuniziert ausschließlich mit nahen Nachbarn via Infrarotsignalen. Diese Nachrichten können zum Beispiel einfache Nummern oder Statusinformationen enthalten, etwa „Ich bin Teil der Form“ oder „Abstand zu Bezugspunkt X = 5“. Da die Reichweite auf wenige Zentimeter begrenzt ist, erhält ein Roboter immer nur Infos von anderen Kilobots in seiner unmittelbaren Umgebung. Aus diesen Puzzleteilen muss er sich ein Bild seiner Situation machen.
Nehmen wir das Beispiel der Formationsbildung: Um etwa gemeinsam einen Stern oder Buchstaben auf dem Boden zu formen, brauchen die Roboter einen Bezugspunkt. Zu Beginn werden ein paar Kilobots als Fixpunkte definiert – zum Beispiel die Eckpunkte des gewünschten Musters. Diese wenigen „Initialroboter“ erhalten per Startsignal die Information, wo sie in der Formation sein sollen, und bleiben an Ort und Stelle stehen. Sie fungieren nun als Leuchtfeuer: Jeder sendet fortwährend eine Kennung aus. Die übrigen Kilobots, die zunächst verstreut umherfahren, empfangen diese Signale, allerdings nicht unbedingt direkt von den Fixpunkten, sondern oft vermittelt über Zwischenroboter. Aus der Anzahl der Weiterleitungen (der „Sprünge“ von Roboter zu Roboter) kann jeder Kilobot ungefähr ableiten, wie weit entfernt er von einem bestimmten Fixpunkt ist – dies nennt man einen Distanz-Gradienten. Vereinfacht gesagt weiß ein Roboter dadurch, in welche Richtung er sich bewegen muss, um dem Ziel näher zu kommen.
Mit dieser minimalistischen Orientierung beginnen die freien Kilobots, sich der wachsenden Robotergruppe anzuschließen. Eine einfache Verhaltensregel könnte lauten: „Bewege dich entlang des Randes der vorhandenen Gruppe, bis du die Position erreichst, an der dein Abstand zum nächsten Fixpunkt dem eines bereits stehenden Nachbarn entspricht – dann bleib stehen.“ Folgt jeder Kilobot dieser und ähnlicher Regeln, füllt sich nach und nach die gewünschte Form auf: Die Roboter docken gleichsam an den richtigen Stellen an. Wichtig ist, dass dabei keiner von ihnen das Gesamtbild kennen muss. Jeder folgt nur seinem lokalen Ziel (z.B. dem nächstgelegenen freien Platz am Formrand), doch am Ende ergibt sich das globale Muster wie von selbst.
Während dieses Prozesses tauschen die Roboter ständig Informationen mit ihren Nachbarn aus, um Fehler zu korrigieren. Zum Beispiel könnte ein Kilobot steckenbleiben oder versehentlich an der falschen Stelle haltmachen. Seine Nachbarn erkennen dann anhand der Abstandsinfos, dass etwas nicht stimmt, und senden ihm eine Art „Hinweis“, sich erneut zu bewegen. Durch solche gegenseitige Kontrolle bleibt der Schwarm anpassungsfähig und robust: Selbst wenn einzelne Roboter ausfallen oder Unregelmäßigkeiten auftreten, kann die Gruppe das Gesamtziel weiterhin erreichen. Die Harvard-Forscher betonen, dass gerade diese Fähigkeit zur kooperativen Fehlersuche entscheidend war, um große Schwärme verlässlich arbeiten zu lassen – der Schwarm gewissermaßen als eigenes Kontrollorgan.
Ähnliche lokale Kooperationsmechanismen kommen auch bei anderen Aufgaben zum Einsatz. In einem Foraging-Experiment etwa simulierten Kilobots das Verhalten von Ameisen auf Futtersuche: Einige Roboter spielten die Rolle von „Nahrung“ oder „Nest“, während die übrigen umherstreiften, nach diesen Zielen „suchten“ und bei Erfolg per Lichtsignal ihre Kameraden herbeiriefen. So konnte der Schwarm gemeinsam alle „Futterstellen“ effizient finden, obwohl kein Roboter einen Überblick über das gesamte Feld hatte. In einem anderen Versuch bewegte sich ein Kilobot als Anführer voraus und die anderen folgten ihm in einer Kette mit einheitlichem Abstand – jeder achtete darauf, seinen Vordermann nicht aus den Augen (bzw. aus dem Infrarotsensor) zu verlieren. Dieses Leader-Follower-Prinzip, bekannt von Gänsen oder Fischen, wurde mit einfachsten Mitteln nachgebildet.
Auch das Phänomen der Synchronisation lässt sich beobachten: Die Kilobots können ihre LED-Lämpchen im Gleichtakt blinken lassen, indem sie das Blinken der Nachbarn als Referenz nehmen – ähnlich wie Glühwürmchen in der Natur ihren Takt angleichen. Solche Experimente zeigen, dass eine Gruppe von Robotern zu kollektiven Zeitgebern werden kann, ohne dass jemand zentral den Takt vorgibt.
In all diesen Szenarien zeigt sich das Grundprinzip: Die Kilobots navigieren in ihrer Umgebung, indem sie sich an lokalen Signalen orientieren und iterativ Korrekturen vornehmen. Jeder Roboter reagiert nur auf das, was seine einfachen Sensoren erfassen – die Nähe eines Nachbarn, ein empfangenes Signal, eine Helligkeitsänderung – und führt daraufhin seine kleinen Aktionsmuster aus (vibrieren, stoppen, blinken etc.). Durch die Masse an Interaktionen entsteht dabei ein koordinierter „Tanz“ des gesamten Schwarms. So lösen die Kilobots Aufgaben im Kollektiv, die ihnen alleine völlig unmöglich wären.
Experimente und Erfolge: Was Kilobots bereits geleistet haben
Seit ihrer Entwicklung haben die Kilobots in zahlreichen Experimenten gezeigt, wozu Schwarmroboter fähig sind. Am spektakulärsten war sicherlich der oben beschriebene Versuch, bei dem 1.024 dieser Miniroboter selbstständig verschiedene Formationen bildeten – darunter Formen wie ein Stern oder der Buchstabe „K“. Dieses Experiment im Jahr 2014 war ein Meilenstein: Erstmals wurde ein Schwarm mit über tausend Robotern in Aktion vorgeführt. Die Kilobots bewiesen damit, dass sich theoretische Modelle der Schwarmintelligenz in die Praxis umsetzen lassen. Die Aufnahmen des „tanzenden” Roboterschwarms gingen um die Welt und weckten breites öffentliches Interesse an der Robotik.
Doch auch abseits dieser Rekordzahlen haben Kilobots vielfältige Forschungsprojekte bereichert. Weil die Hardware offen entwickelt und über einen kommerziellen Partner verfügbar gemacht wurde, schafften sich viele Universitäten eigene Kilobot-Sets an. So wurden die kleinen Roboter beispielsweise eingesetzt, um das Verhalten sozialer Insekten zu erforschen: Man ließ sie Ameisenwege simulieren, indem sie etwa virtuelle „Duftspuren” per Signal austauschten, oder testete, wie Bienen kollektiv eine neue Niststätte auswählen – übertragen auf Roboter, die zwischen verschiedenen Zielorten konsensbasiert entscheiden. Auch kollektive Transportaufgaben wurden untersucht: Zwar kann ein einzelner Kilobot kaum Gewicht bewegen, aber Experimente zeigen, dass mehrere gemeinsam ein kleines Objekt anschieben und so transportieren können, wenn sie ihr Vorgehen synchronisieren. Damit imitierten sie das Vorbild von Ameisen, die zusammen Beute in den Bau schleppen.
Ein weiteres Feld ist die verteilte Entscheidungsfindung. Kilobot-Schwärme wurden so programmiert, dass sie aus mehreren Optionen die beste auswählen – zum Beispiel den hellsten von mehreren Lichtflecken als Ziel. Dabei „stimmen” die Roboter gewissermaßen ab, indem sie sich gegenseitig ihre Wahrnehmung (etwa Helligkeitswerte) mitteilen und nach einfachen Mehrheitsregeln entscheiden. Solche Experimente helfen zu verstehen, wie aus individuellen Meinungen im Schwarm eine kollektive Entscheidung emergiert. Interessanterweise ähneln die dabei eingesetzten Algorithmen oft jenen aus der Biologie, etwa dem Entscheidungsprozess eines Bienenvolks.
Auch im Bereich der Bildung und Öffentlichkeitsarbeit haben Kilobots bereits Wirkung gezeigt. Dank ihres geringen Preises und der anschaulichen Demonstrationen eignen sie sich, um Schülern und Studenten das Prinzip der Schwarmrobotik näherzubringen. In Robotik-Wettbewerben oder Workshops können Teams eigene Strategien auf kleinen Schwärmen austesten. Die Faszination, die von Dutzenden sich selbst organisierenden Minirobotern ausgeht, bringt Menschen zum Staunen – und senkt zugleich die Hemmschwelle, sich mit Robotik und Programmierung zu beschäftigen. So gesehen sind die Kilobots nicht nur ein Forschungsinstrument, sondern auch Botschafter einer neuen Technologie.
Ausblick: Mögliche Anwendungen – von der Umwelt bis zur Medizin
Derzeit verrichten Kilobots ihre Dienste vor allem in Laborumgebungen. Doch die Konzepte der Schwarmrobotik, die an ihnen erprobt wurden, haben das Potenzial, in vielfältigen praktischen Anwendungen eingesetzt zu werden. Blickt man einige Jahre oder Jahrzehnte in die Zukunft, zeichnen sich spannende Szenarien ab:
Umweltüberwachung: Schwärme autonomer Roboter könnten künftig helfen, unsere Umwelt im Auge zu behalten und zu schützen. Man stelle sich Hunderte kleiner Sensor-Roboter vor, die sich selbstständig in einem Wald oder einem Gewässer verteilen, um dort kontinuierlich Daten zu sammeln – etwa über Luft- und Wasserqualität, Temperaturen oder Schadstoffkonzentrationen. Im Verbund könnten sie ein dichtes Messnetz bilden, das Veränderungen frühzeitig erkennt. Ähnlich könnten Roboterkolonien auch eingesetzt werden, um Umweltverschmutzungen zu bekämpfen, zum Beispiel Ölteppiche auf dem Meer aufzuspüren und einzudämmen. Durch ihre Schwarmintelligenz könnten sie dabei flexibel auf Wind und Strömungen reagieren, ohne dass jedes Gerät einzeln gesteuert werden muss.
Katastrophenschutz: In Unglücks- und Krisensituationen könnten Schwarmroboter Leben retten. Stellen wir uns einen Gebäudeeinsturz nach einem Erdbeben vor: Zahlreiche kleine Roboter – vielleicht etwas größer und robuster als die filigranen Kilobots – könnten sich wie Ameisen in die Trümmer zwängen, auf der Suche nach eingeschlossenen Überlebenden. Durch ständige Kommunikation würden sie einander den Weg zeigen, flächendeckend Hohlräume erkunden und sogar gemeinsam Lasten abtragen oder provisorische Stützstrukturen bilden, um Wege freizumachen. So ein Roboterschwarm könnte viel schneller und sicherer arbeiten als ein einzelner Rettungsroboter, weil er an vielen Stellen gleichzeitig aktiv sein und auf unvorhergesehene Situationen unmittelbar reagieren kann. Auch bei Waldbränden oder Überschwemmungen wären Schwärme denkbar: Etwa Drohnenschwärme, die koordiniert ein großes Gebiet überfliegen, Brandherde lokalisieren und Einsatzkräften live ein Lagebild liefern.
Medizin und Gesundheit: Die vielleicht futuristischste Vision liegt im medizinischen Bereich. Forscher träumen von winzigen Robotern, die durch den menschlichen Körper schwimmen – sogenannte Nanobots – und dort in Schwärmen Krankheiten bekämpfen. Zwar sind Kilobots mit 3 cm Größe noch weit von einem Blutkreislauf-Einsatz entfernt, aber die an ihnen erforschten Mechanismen der Koordination lassen sich prinzipiell auf Mikroroboter übertragen. Eines Tages könnten Schwärme aus tausenden Mini-Maschinen einen Tumor gezielt von innen attackieren, Blutgerinnsel auflösen oder als intelligente Medikamentenkurier Wirkstoffe genau an die richtigen Stellen im Körper bringen. Auch in der Chirurgie sind Konzepte denkbar, bei denen Schwärme kleiner Robotereinheiten minimalinvasive Eingriffe vornehmen – jeder übernimmt einen Teil der Aufgabe, und gemeinsam erzielen sie den Heilungserfolg.


Industrie und Alltag: In Fabrikhallen der Zukunft könnten Schwarmroboter für eine neue Flexibilität sorgen. Anstatt starrer Fließbänder würden hunderte kleine mobile Roboter die Werkstücke autonom von Station zu Station befördern und sich dabei selbst optimal organisieren. Wenn irgendwo mehr Bedarf ist – etwa an einer Montagestraße –, würde einfach ein größerer Teil des Schwarms dorthin „fließen“. Fällt ein Gerät aus, springen andere ein. So entsteht eine hochgradig resiliente Produktion, die sich dynamisch anpasst. Schon heute experimentieren Lagerhäuser mit robotischen Teams, die Regale sortieren und Lieferungen zusammenstellen; künftige Systeme könnten diesen Gedanken auf die Spitze treiben mit völlig dezentral agierenden Logistik-Robotern. Und auch im Haushalt ist der Gedanke reizvoll: Statt ein einzelner Haushaltsroboter, der alles können muss, hätte man vielleicht einen Schwarm kleiner Helfer – einer kümmert sich ums Staubsaugen unter dem Sofa, während ein anderer gleichzeitig die Fenster putzt, und wieder andere sortieren die Recycling-Abfälle. Sie koordinieren sich untereinander, sodass nichts vergessen wird und sich keiner in die Quere kommt.
Natürlich sind viele dieser Visionen heute noch Zukunftsmusik. Die Welt außerhalb des Labors stellt Schwarmroboter vor große Herausforderungen: unebenes Terrain, Wetter, unvorhersehbare Bedingungen, und in der Medizin die komplexe Umgebung des Körpers. Doch die Forschung rund um Systeme wie den Kilobot schafft die Grundlagen, um solche Herausforderungen anzugehen. Mit jeder Verbesserung in Sensorik, Antriebstechnik und Algorithmen rücken praktische Schwarm-Anwendungen näher. Was heute ein Schwarm kleiner runder Roboter auf einer Tischplatte vormacht, könnte morgen in großem Maßstab Wirklichkeit werden – zum Nutzen von Umwelt, Sicherheit, Gesundheit und Industrie. Die Zukunft der Robotik dürfte in vielerlei Hinsicht eine Schwarm-Zukunft sein, in der die Stärke der vielen kleinen Helfer die Grenzen des Einzelnen überwindet.